

Humanoid 및 Cobot 개발자는 Nvidia의 풀 스택 안전 플랫폼을 사용할 수 있습니다. 출처 : Nvidia
Nvidia Corp.는 오늘 파리의 GPU 기술 컨퍼런스 또는 GTC에서 로봇, 자율 주행 차 및 스마트 시티 개발에 인공 지능을 적용하기위한 새로운 도구를 발표했습니다. 이 회사는 유럽 제조업체가 노동 부족과 지속 가능성에 대한 강조로 인해 소프트웨어 정의 및 AI 중심이되기 위해 프로세스를 재창조하기 위해 경쟁하고 있다고 주장했다.
NVIDIA의 Omniverse and Simulation Technology 부사장 인 Rev LeBaredian은“지금은 물리 AI의 시대입니다. “향후 5 년 동안, 우리는 5 천만 명의 사람들이 노동 격차를 할 것입니다. 제조업의 개신과 재조정으로 더 많은 공장과 창고를 그 어느 때보 다 더 빨리 건설해야 할 것입니다.”
nvidia Isaac Gr00t N1.5개방형 기초 모델 휴머노이드 로봇 추론 및 기술은 이제 다운로드 할 수 있습니다. 포옹 얼굴. 이 업데이트는 모델의 적응성과 지침을 따르는 능력을 향상시켜 성능을 향상시킵니다. 자재 취급 그리고 조작 작업.
Nvidia Isaac SIM 5.0 및 Isaac Lab 2.2 Open-Source 로봇 공학 NVIDIA RTX PRO 6000 시스템에 최적화 된 시뮬레이션 및 학습 프레임 워크, 사용 가능합니다 개발자 미리보기를위한 Github에서.
유럽 생태계는 Nvidia의 3 대 컴퓨터를 기반으로합니다
Nvidia가 말했다 유럽최고의 로봇 개발자와 공급 업체가 통합하고 있습니다 이삭 훈련 할 로봇 플랫폼, 시뮬레이션다른 구체 예에 따라 로봇을 배치합니다. 그것은 그들이 그것을 따르고 있다고 말했다 3 개 컴퓨터 접근여기에는 다음이 포함됩니다.
- nvidia DGX AI 모델 교육 및 AV 소프트웨어 개발을위한 시스템 및 GPU
- Nvidia Omniverse 그리고 코스모스 실행되는 플랫폼 OVX 시뮬레이션 및 합성 데이터 생성 시스템, 자율 주행 시나리오의 테스트 및 검증 및 스마트 팩토리 운영 최적화 가능
- 자동차 등급 Nvidia AGX를 드라이브하십시오 안전한 자율 주행을위한 실시간 센서 데이터 처리를위한 차량 내 컴퓨터
Lebaredian은 Nvidia의 모든 컴퓨터는 모든 소프트웨어를 실행할 수 있지만 아키텍처는 크기가 다르며 산업용 로봇 및 자체 운전 차량에서 인간화 차량에 이르기까지 다양한 형태의 요인으로 최적의 성능을 위해 다르게 조정 될 것이라고 말했다.
수많은 로봇 공학 회사가 Nvidia의 하드웨어와 소프트웨어를 사용하여 시스템을 더 똑똑하고 안전하게 만들고 있으며, 이번 주 파리에는 몇몇은 파리에 전시되고 있습니다. 예를 들어, 민첩한 로봇 GR00T N1 모델을 후 훈련시킵니다 이삭 실험실 Nvidia에서 실행되는 듀얼 암 조작자 로봇을 훈련시키기 위해 제트슨 산업 환경에서 다양한 작업을 실행하는 하드웨어.
그 동안에, 이상적인 작업 Mega Nvidia를 채택했습니다 Omniverse Blueprint Blueprint의 기능을 연장하기위한 로봇 함대 시뮬레이션 휴머노이드. VDA 5050 프레임 워크를 바탕으로 Advelworks는 객체를 선택, 이동 및 배치와 같은 작업을 지원하는 지침을 개발하는 데 도움이됩니다.
신경 로봇 공학 Nvidia Isaac 플랫폼을 통합하여 로봇 개발 워크 플로우를 향상시키고 있습니다. 이 회사는 Gr00T-Mimic을 사용하여 Isaac Gr00t N1 Robot Foundation Model을 사후 훈련하고 있습니다. 남성 서비스 로봇.
Neura는 또한 SAP 및 NVIDIA와 협력하여 SAP의 Joule 에이전트를 로봇과 통합하여 Mega Nvidia Omniverse Blueprint를 사용하여 배치 전에 복잡하고 사실적인 작동 시나리오에서 로봇 동작을 시뮬레이션하고 개선합니다.
Vorwerk Isaac Lab에서 gr00t N1 모델 이후의 훈련 후 사용자 정의 합성 데이터 Isaac Gr00t-Mimic에 구축되고 Nvidia에 의해 구동되는 파이프 라인 Omniverse 플랫폼. 그런 다음 향상된 모델은 NVIDIA에 배포됩니다 Jetson AGXJetson Orin 또는 고급 실시간 홈 로봇 공학을위한 Jetson Thor 모듈.
휴머노이드 NVIDIA의 전체 로봇 공학 스택을 사용하고 있습니다 이삭 심 그리고 Isaac Lab은 프로토 타이핑 시간을 6 주 줄였습니다. 회사는 NVIDIA에 대한 VLA (Vision Language Action) 모델을 교육하고 있습니다. DGX B200 로봇의인지 능력을 높이기위한 시스템으로 제트슨 토르 온보드 컴퓨팅을 사용하여 복잡한 환경에서 자율적으로 작동 할 수 있습니다.
유니버설 로봇 가지다 소개 UR15, 가장 빠릅니다 공동 작업 로봇 그러나 유럽 시장에. Ur ‘s AI Accelerator 사용-Nvidia Isaac 플랫폼의 Cuda Accelerated Libraries에서 개발되었습니다. 일체 포함 Jetson AGX Orin뿐만 아니라 모델과 제조업체는 AI 애플리케이션을 구축하여 새로운 코봇에 인텔리전스를 포함시킬 수 있습니다.
하이킹 봇‘Nova 운영 체제는 이제 Omniverse와 통합되어 물리적 로봇에 배치되기 전에 로봇 동작을 시뮬레이션, 검증 및 최적화합니다. Wandelbots는 또한 EY 및 EDAG와 협력하여 Omniverse의 확장 가능한 자동화 플랫폼을 제공하여 개념 증명에서 본격적인 배포로 전환을 가속화합니다.
로봇 공학을 확장하십시오 사용 중입니다 Isaac Gr00t 고객이 비주얼과 같은 산업 작업을위한 로봇을 제어하고 훈련시킬 수있는 플랫폼 점검 방사성 물질 취급. 회사의 고급 역학 지원 시스템을 통해 사용자는 데모 데이터를 수집하고 다양한 것을 생성 할 수 있습니다. 합성 데이터 세트 NVIDIA GR00T-MIMIC 및 GR00T-GEN을 사용하여 GR00T N1 Foundation 모델을 훈련시킵니다.
아픈 새로운 인증을 통합하고 있습니다 감지기 Nvidia Isaac SIM에 2D 및 3D LIDARS, 안전 스캐너 및 카메라뿐만 아니라 모델. 이를 통해 엔지니어는 Omniverse 내에서 Sick의 인식 모델을 사용하여 기계를 사실상 설계, 테스트 및 검증하여 제품 개발에서 대규모 로봇 함대 관리에 이르기까지 프로세스를 지원할 수 있습니다.
도요타 자재 취급 자율 모바일 로봇을 시뮬레이션하기 위해 Softserve와 협력하고 있습니다.AMRS) Mega Nvidia Omniverse Blueprint를 사용하여 인간 노동자와 함께 일합니다. Toyota는 실제 배치 전에 AI 알고리즘을 개선하기 위해 트래픽 시나리오를 테스트하고 시뮬레이션합니다.
Halos는 AVS, 로봇을위한 안전 프레임 워크를 제공합니다
Nvidia는 Nvidia를 발표했습니다 후광 – 포괄적 인 안전 하드웨어 아키텍처, AI 모델, 소프트웨어, 도구 및 서비스를 통합하는 시스템 – 자율 주행 차에서 확장되었습니다.AVS) AI 구동 로봇의 전체 개발 수명주기. Halos는 또한 알고리즘, 배포 시간 및 시뮬레이션 및 훈련 계산과 같은 기술을 다루며 다양한 개발 단계에서 “Guardrails”를 제공합니다.
Nvidia Halos AI Systems Inspection Lab은 ANSI National Accreditation Board에서 인증을 받았습니다.아나 브) 기능 안전에 대한 검사를 수행합니다.
“NVIDIA의 ANAB에 대한 NVIDIA의 최신 평가는 국제적으로 인정 된 표준에 대한 역량과 준수 여부를 검증하여 Automotive에서 Robotics에 이르기까지 자율 머신 개발자가 기능 안전을위한 최고 벤치 마크를 충족시킬 수 있도록 돕습니다.
Halos는 전체 로봇 개발 수명주기 전체에서 안전을 강화하는 로봇 공학 리더를 지원하기 위해 다음을 제공합니다.
- 안전 확장 패키지 Nvidia를 위해 IGX TUV Rheinland의 NVIDIA IGX 검사에 의해 지원되는 제조업체가 로봇에 안전 기능을 쉽게 프로그래밍 할 수 있도록하는 플랫폼
- 로봇 안전 플랫폼여기에는 IGX 및 Nvidia Holoscan 센서 브리지가 포함되어 있으며 내장 된 AI 안전을 갖춘 센서 대 복수 아키텍처 설계에 대한 통일 된 접근 방식.
- 외부 안전 AI 검사관로봇 운영 모니터링을위한 AI 기반 에이전트로 작업자 안전을 개선하는 데 도움이됩니다.
Arcbest, AdvantechBluewhite, 보스턴 역학,,, 요새inxpect, kionNexcobot – Nexcom 회사, Sick 및 Synapticon은 Halos Inspection Lab에 가입하고 NVIDIA의 안전 및 제품을 통합 한 최초의 로봇 회사 중 하나였습니다. 사이버 보안 요구 사항.
Lebaredian은“자율성은 여행입니다. “고객은 Omniverse에 가상 시설을 구축하여 최적화 계획 및 처리에 사용할 수있는 가상 시설을 구축하는 것으로 시작합니다. 그런 다음 동일한 디지털 트윈을 사용하여 로봇을 훈련, 테스트 및 시뮬레이션 할 수 있습니다.”
“우리의 첫 번째 파트너 중 일부는 다음 단계에 있으며 BMW는 가상 공장을 사용하여 혼합 로봇과 메르세데스 벤츠의 함대를 시뮬레이션하여 휴머노이드 배치를 테스트합니다.” “Toyota와 Schaeffler와 같은 신규 고객은 Omniverse 여행을 시작하고 있습니다.”

{kind=link}
Siemens 제조 분야의 AI 파트너
지멘스 그리고 Nvidia는 그들의 확장되었습니다 공동 Siemens를 더욱 통합하려면 xcelerator Nvidia의 시장 Omniverse생성뿐만 아니라 생성 일체 포함 그리고 로봇 공학. 회사들은 이것을 할 것이라고 말했다 ~할 수 있게 하다 시각화와 더 현실적입니다 디지털 쌍둥이 더 많은 정보를 얻은 결정.
Lebaredian은 언론 브리핑에서“이것은 정말 흥미로운 파트너십으로 Nvidia의 풀 스택 AI 컴퓨팅 인프라와 Siemens의 대규모 범위를 16 조 달러의 글로벌 제조 시장에 모았습니다.
시멘스 산업용 부실 운영의 경우 생성 AI를 상점 층 운영자에게 제공하며 NVIDIA RTX PRO 6000 BlackWell Server Edition GPU와 함께 구내에서 실행하도록 최적화됩니다. Copilot은 NVIDIA에 의존합니다 니모 비디오 검색 및 요약을위한 마이크로 서비스 및 NVIDIA AI BluePrint를위한 실시간, AI 기반 AI 기반 지원을 제공하여 반응성 유지 보수 시간의 30%를 절약 할 수 있습니다.
또한 새로운 Siemens 라인 산업용 PC NVIDIA GPU에 대한 인증은 열, 먼지 및 진동을 견딜 수있어 24/7 작동을 허용합니다. 파트너는 이들은 품질 검사에서 예측 유지 보수에 이르기까지 복잡한 로봇 공학 작업을 가능하게하며 AI 실행에 25 배의 가속도를 제공 할 수 있다고 말했다.
NVIDIA는 시뮬레이션 기능을 향상시킵니다
방송또 다른 nvidia 연구 프로젝트는 신경 렌더링이라는 AI 프로세스를 사용하여 실제 세계에서 빛이 어떻게 행동하는지 대략적으로 근사했습니다. 이 회사는 DiffusionRenderer가 비디오 조명 제어, 편집 및 합성 데이터 확대를위한 프레임 워크를 제공하여 유용하다고 말했다. 물리적 ai 비디오 게임 디자인과 같은 개발 및 창의적 산업.
Nvidia는 DiffusionRenderer를“주간 장면을 나이트 스케이프로 바꾸고 화창한 오후를 흐린 날로 바꾸고 가혹한 형광 조명을 부드럽고 자연스러운 조명으로 바꿀 수있는 비디오의 AI 라이트 스위치”라고 설명했습니다.
Lebaredian은“유럽의 Superparching Industrial AI 유병률을 돕기 위해 Deutsche Telekom과 제휴하여 독일에서 세계 최초의 산업 AI 클라우드를 구축하고 있습니다. “빌드 아웃은 10,000 RTX PRO 및 B200 GPU로 시작하여 독일 최대의 AI 공장 배포 T입니다. o 독일 연방 정부 프로젝트의 날짜와 첫 단계는 국가의 주권 AI 인프라를 구축합니다.”
새로운 산업 AI 독일의 공장은 Nvidia를 특징으로합니다 DGX B200 그리고 Nvidia RTX Pro 서버. 유럽 산업 리더가 엔지니어링 및 시뮬레이션에서 공장 디지털 쌍둥이 및 로봇 공학에 이르기까지 모든 제조 응용 프로그램을 가속화 할 수 있도록 의도되었습니다. 그들은 Siemens, Ansys, Cadence 및 Rescale과 같은 주요 소프트웨어 제공 업체의 Nvidia Cuda-X 라이브러리, RTX 및 Omniverse-Accelerated Workload를 실행합니다.
이 회사는 제품 설계 및 공장 계획에서 AI 중심 운영 및 물류에 이르기까지 모든 유럽 제조업체와 협력하고 있다고 밝혔다.
NVIDIA는 자율 주행 차, 스마트 도시를위한 준비
Nvidia가 말했다 운전하다 AVS 용 소프트웨어는 이제 전체 생산 상태입니다. 후광에는 nvidia가 포함됩니다 드라이 포인증 된 프레임 워크는 엄격한 자동차 표준을 충족하면서 안전한 차량 운영을위한 안정적인 기반을 제공하기위한 프레임 워크입니다.
또한 Nvidia는 Nvidia를 발표했습니다 코스모스 예측 -2새로운 세계 재단 모델 고품질을위한 미래의 세계 국가 예측 능력이 향상되었습니다 합성 데이터 생성. 이 회사는 새로운 모델이 시각적 입력과 텍스트에 대한 상황에 대한 이해로 AV의 훈련을 가속화하여“환각”을 줄일 수 있다고 말했다.
최고의 오픈 소스 AV 시뮬레이터 인 Carla의 최신 릴리스는 Cosmos Transfer Application Programming Interfaces (API)와 NVIDIA Nurec 도구를 신경 재구성 및 렌더링을 통합했습니다. 이 회사는 150,000 명 이상의 AV 개발자 인 Carla의 사용자 기반이 이제 합성 시뮬레이션 장면과 관점을 높은 충실도로 렌더링 할 수있을뿐만 아니라 간단한 프롬프트를 사용하여 조명, 날씨 및 지형의 끝없는 변형을 생성 할 수 있다고 말했다.
Lebaredian은“자율 주행과 로봇 공학을위한 스택의 큰 차이점은 성숙의 수준입니다. “자율 주행은 일반 로봇 공학보다 오랜 시간 동안 규모로 생산되어 왔지만 매우 빠르게 움직이고 있습니다. 스택 수준에서 중복성과 안전의 구축 측면에서 Halos와 이야기 한 모든 내용은 매우 유사합니다.”
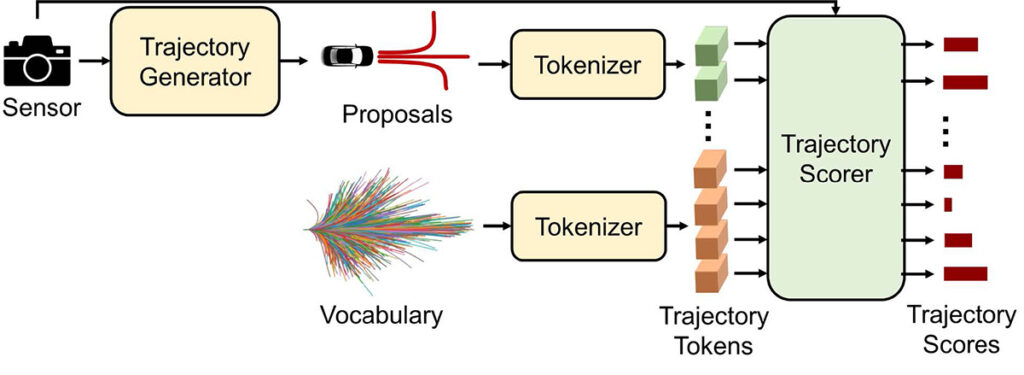
GTRS 모델 아키텍처 다양한 운전을 생성하고 점수를 매기는 통일 시스템을 보여주는 GTR 모델 아키텍처
확산 및 어휘 기반 궤적을 사용한 궤적. 출처 : Nvidia
회사는 또한 그 승리를 선전했다 자율적 인 그랜드 챌린지 컴퓨터 비전 및 패턴 인식에서 (CVPR) 이번 주 내쉬빌에서 회의.
Nvidia는 60 개가 넘는 논문을 제시했을뿐만 아니라 AV 응용 연구팀 일반화 된 궤적 스코어링 (GTRS) 방법을 제시했습니다. GTR은 다양한 궤적을 생성하고 점차 최고의 궤적을 걸러냅니다. Nvidia는 더 안전하고보다 적응 형 운전 궤적을 생성하는 데 도움이 될 수 있다고 말했다.
NVIDIA OMNIVERE BLUEPRINT for Smart City AI는 참조입니다. 뼈대 이는 회사의 시뮬레이션과 AI 플랫폼을 결합하여 개발자가 시뮬레이션 준비 또는 SIMREADY 도시 전체의 사진을 모니터링하고 최적화하는 데 도움이되는 AI 에이전트를 구축하고 테스트하기 위해 전체 도시의 사진을 구축하고 테스트합니다.
Lebaredian은“유럽은 처음 두 번의 산업 혁명을 이끌었습니다. “그리고 이제 AI 시대에 새로운 산업이 개화되고 있습니다. 로봇 공학. 메카트로닉스와 산업 공예의 풍부한 역사로 유럽 로봇 제조업체들은 자율적 인 세계적 힘으로 부상하고 있습니다.”
게시물 Nvidia Isaac, Omniverse 및 Halos를 지원하여 유럽 로봇 공학 개발자 먼저 나타났습니다 로봇 보고서.