


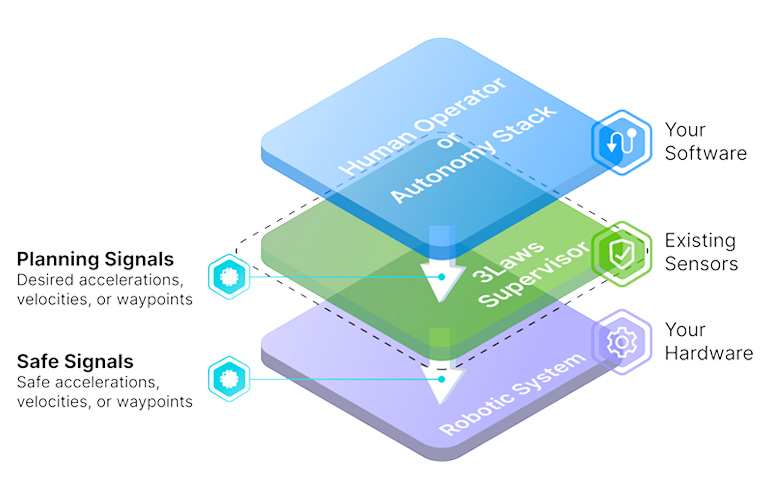
3Laws의 Supervisor는 자율성 스택과 로봇 사이에서 작동하여 모션 명령을 실시간으로 모니터링하고 수정하여 충돌 방지, 지오펜싱, 시스템 안정성 및 기타 필요한 결과를 제공하는 소프트웨어 계층입니다. | 크레딧: 3Laws Robotics
3Laws Robotics는 회사를 확장하고 엔지니어링 및 고객 지원 팀을 성장시키기 위한 채용을 시작하기 위해 초기 자금 410만 달러를 확보했습니다. 텐원텐 의 참여를 포함하는 라운드를 주도했습니다. 아마존 산업혁신펀드. 모든 사전 시드 투자자는 이번 라운드에서 소유권을 유지하거나 늘리기로 결정했습니다.
3Laws 공동 창립자이자 CEO인 Andrew Singletary 박사는 “이전 투자자 모두가 주저 없이 재투자하기로 결정한 것은 환상적인 신뢰 투표입니다.”라고 말했습니다. ”우리는 지난 10년 동안 상당한 발전을 이루었지만 대부분의 기계는 여전히 자율적으로 작동하지 않습니다. 지금까지는 시스템을 안전하고 효율적으로 만드는 보편적인 방법이 없었으며 자율 시스템이 시스템을 중단하지 않고 실시간 변화에 안전하게 반응하는 것은 엄청나게 어려운 일이었습니다. 3Laws는 실시간 가드레일을 제공하여 역동적인 환경에서 사람들과 함께 작동하는 AI 기반 기계를 감독합니다. 이는 안전성과 시스템 성능을 모두 가능하게 하는 기술적 도약입니다.”
3Laws 공동 창립자 Aaron Ames 교수는 The Robot Report 팟캐스트의 게스트 올해 초 그는 CalTech 연구소에서 개발된 연구를 통해 회사가 어떻게 형성되었는지 설명했습니다.
연구실에서 생산까지
이 회사는 개념을 만들고 다양한 시스템에서 구현을 개발/성공적으로 시연하는 책임을 맡고 있는 Ames 교수와 그의 연구실 구성원 중 일부에 의해 설립되었습니다. 여기에는 휴머노이드 및 4족 보행 로봇, 바퀴 달린 차량, 자율 트럭, 쿼드 헬리콥터, 수상 스포츠 보트, 상업용/군용 항공기가 포함됩니다. 3Laws 공동 창립자는 모두 Ames 교수의 전직 학생입니다.
솔루션의 핵심에는 움직이는 물리적 시스템을 원하는 작동 영역 내에 머물도록 제한하는 수학적 공식인 제어 장벽 기능(CBF)이 있습니다. 바람직한(또는 “불변 세트”) 영역으로 정의된 영역으로 시스템을 다시 명령함으로써 안정성 및 안전성과 유사한 특정 속성을 제공할 수 있습니다. 이론적으로 이러한 속성은 시스템이 사용되는 수학적 모델에 따라 응답하는 한 보장됩니다.
CBF 자체는 시스템의 현재 상태에서 경계까지의 거리를 측정하는 수학적 함수입니다. 목표는 시스템을 경계 내에 유지하는 것입니다. 경계 또는 장벽의 정의는 충돌 회피, 지오펜싱, 넘어짐, 공격 각도 초과, 가속도 위반 등을 포함한 다양한 목표를 충족하기 위해 구축될 수 있습니다. 이 공식의 주요 장점 중 하나는 여러 대물렌즈를 동시에 적용할 수 있다는 것입니다.
Amazon Industrial Innovation Fund의 책임자인 Franziska Bossart는 “Amazon에서는 안전이 최우선이며 3Laws의 소프트웨어가 Amazon에 배포된 다양한 자동화 시스템의 안전을 지원하는 데 도움이 될 수 있다고 믿습니다.”라고 말했습니다. “우리는 협업 로봇 공학과 자율 시스템을 가속화할 수 있는 잠재력을 가진 소프트웨어를 구축하는 3Laws 팀을 지원하게 되어 기쁘게 생각합니다.”
소프트웨어 기반 동적 안전 기능

오늘 3Laws는 기존 센서를 활용하여 모든 자율 시스템에 보편적으로 배포할 수 있는 동적 안전 소프트웨어를 개발했다고 밝혔습니다. 회사의 핵심제품, 감독자유연하고 확장 가능하며 기본 구조를 수정하지 않고도 기존 자율성 스택에 통합할 수 있습니다.
Supervisor는 기존 자율 소프트웨어의 신호를 모니터링하고 필요한 경우 이를 변조하여 결정적이고 설명 가능한 방식으로 동적 안전을 보장합니다. 개발 엔지니어의 경우 Supervisor는 코너 케이스를 제거하고 개발 시간을 단축합니다. 운영 관리자의 경우 Supervisor는 효율성 향상, 신뢰성 향상 및 위험 감소를 보장합니다. 최종 결과는 사용자가 자신있게 신뢰하고 배포할 수 있는 시스템입니다.
올해 회사는 두 가지 버전의 Supervisor를 개발하여 출시했습니다. 기본 Supervisor는 ROS 기반 모바일 로봇과 함께 즉시 작동하도록 설계되었습니다. 3Laws의 제품 담당 부사장 Amir Sharif에 따르면 이는 단기간 내에 구성 및 배포가 가능하다고 합니다. Supervisor Pro 버전은 모든 제어 시스템에서 작동할 수 있지만 맞춤형 시스템과 작동하려면 3Laws의 광범위한 통합이 필요할 수 있습니다.
Ames 교수는 Supervisor Pro가 최근 F16 전투기에 배치되었다고 언급했습니다. 항공기에서 시스템은 조종사 제어를 무시하고 항공기를 지리적 울타리 안에 유지하는 데 도움이 되도록 성공적으로 테스트되었습니다. Ames에 따르면 이는 Supervisor 사용 가능성의 한 예일 뿐입니다.
3Laws Supervisor는 누가 사용할 수 있나요?
로봇 안전은 산업, 상업 또는 소비자 로봇 솔루션을 구현하는 데 매우 중요합니다. 여기에는 자율 주행 차량, 라스트마일 배송 차량, 드론, 모바일 로봇, 다관절 로봇 팔, 네 발 달린 동물 등의 사용 사례가 포함됩니다. 감독자는 인간 제어 입력 또는 자율 제어 입력과 기본 로봇 제어 시스템 사이에 위치하도록 설계되었습니다. 이는 요청된 설정점을 평가하고 출력이 시스템을 안정적으로 유지할지 또는 불안정하게 보낼지 모두 실시간으로 결정합니다.
3Laws Supervisor는 동적 시스템의 사고나 고장을 유발할 수 있는 제어 신호의 전달을 방지하기 위한 것입니다. 이는 로봇 증폭기의 전원을 차단하고 모터를 정지시키는 비상 정지와는 다릅니다. 감독자는 동적 시스템의 제어된 종료를 실행할 수 있습니다. 이러한 유형의 안전 제어 알고리즘은 주어진 상황에서 다리가 있는 인간형 로봇을 제어하는 데 꼭 필요한 것일 수 있습니다.
감독자는 아직 기존 안전 규정에 대해 안전 인증을 받지 않았지만 Ames 교수는 3Laws 제품 로드맵이 향후 이 이정표에 도달할 것이라고 믿습니다.


게시물 3Laws는 로봇 안전 개선을 위해 410만 달러의 초기 자금을 확보했습니다. 처음 등장한 로봇 보고서.