

ADAR은 기존 센서 패키지보다 저렴한 비용으로 3D 360도 장애물 감지를 가능하게합니다. | 출처 : Sonair
킬러 드론. 터미네이터-유형의 휴머노이드. 구석 구석에 살인 봇. 인간-로봇 관계가 책과 영화에서 끊임없이 갈등을 겪고있는 미래에 대한 이러한 디스토피아 비전.
그러나 실제 세계에서는 인간과 로봇이 공장, 창고, 병원 및 가정에서 매일 평화롭게 공존합니다. 이것은 로봇에게 큰 감사입니다 안전 글로벌 전문가들이 수십 년에 걸쳐 개발 한 표준.
따라서 평화로운 인간 로봇 공존에 대한 이야기는 조금 극적으로 들릴지 모르지만 로봇 안전 없이는 과장된 것은 아닙니다. 표준효과적인 인간-로봇 공존 또는 협력은 전혀 없을 것입니다. 실제로 혼란이있을 것입니다.
로봇 안전 표준이 중요한 이유
로봇 안전 표준은 로봇이 인간을 중심으로 안전하게 운영되도록 개발 된 지침 및 규정입니다. 안전 표준은 하드웨어 및 소프트웨어의 설계, 통합, 운영 및 유지 보수에 대한 요구 사항을 정의합니다. 이것은 충돌과 부상의 위험을 최소화합니다.
표준은 안전 거리, 속도 제한, 비상 정지 기능 및 위험 평가와 같은 요소를 간략하게 설명합니다. 이러한 구조화 된 안전 요구 사항은 불확실성을 줄이고 안전한 인간-로봇을위한 예측 가능한 제어 환경을 만듭니다. 상호 작용. 상상할 수있는 모든 상황에서는 시스템이 안전하지 않지만 표준은 인간이 공간을 공유하는 로봇을 신뢰할 수 있음을 의미합니다.

인간-로봇 안전은 복잡한 환경입니다
글로벌 로봇 안전 환경이 복잡하다고 말하는 것은 엄청난 과소 평가입니다. 첫째, 로봇 안전 표준을 개발하는 표준이 둘 이상의 표준이 있습니다.
국제 표준화기구 (ISO), 로봇 산업 협회 (Robotic Industries Association) (RIA이제 자동화 발전 협회의 일부 또는 A3) 및 유럽 표준 (안에)은 전 세계적으로 가장 잘 알려져 있고 가장 널리 채택되어 북미와 유럽에서 가장 널리 채택됩니다. 하지만, 거기 ~이다 기타 ~에 일본,,, 중국그리고 인도 또한 추적합니다.
그런 다음 표준이 다른 관할 구역에서 다른 이름을 가질 수 있다는 사실이 있습니다. 예를 들어, ISO 10218 산업 로봇 안전을위한 글로벌 표준입니다. 유럽에서는 EN ISO 10218로 구현됩니다. 일본에서는 JIS B 8433-1/2로 구현됩니다. 그리고 마지막으로 미국에서는 ANSI/RIA R15.06 기준.
또한, 다른 지역은 표준을 다르게 시행합니다. 예를 들어, 유럽에서 의무적 인 표준은 미국에서 자발적 일 수 있으며 그 반대도 마찬가지입니다. 또한, 하나 이상의 표준 기관이 단일 지역에서 작동 할 수 있습니다.
확립 된 표준에 따라 안전 인증 달성은 심각한 독창적 인 장비 제조업체 (OEM)에게는 번거롭지 만 필요한 작업입니다. 그리고 많은 지역에서 법에 의해 요구되지는 않지만,이 과제의 핵심 부분은 공인 독립된 제 3 자 테스트 시설 및 다음과 같은 조직으로 제품을 보내는 것과 관련이 있습니다. ASTM 국제. 이는 또한 제품이 안전 요구 사항을 준수하기 위해 엄격하게 테스트되는 동안 참을성있게 기다리는 것을 의미합니다.
‘표준 경찰’이 없음과 규정 준수가 작동하는 방법
로봇 안전 표준을 준수하는 경우가 종종 자발적이고 이러한 요구 사항을 시행 할“표준 경찰”또는 Robo 경찰이 없다면 어떻게 효과적 일 수 있습니까?
로봇을 중심으로 일하는 인간에게 좋은 소식은 규정 준수 및 타사 테스트가 자발적인 지역 인 지역에서도 기업은 서로의 규정 준수를 요구한다는 것입니다. 창고는 자율 모바일 로봇을 원합니다.AMRS) 국제적으로 인정 된 표준을 준수합니다. 제조 시설은 걸어 다니는 인간을 공격하지 않는 산업용 로봇을 원합니다. 표준은 이러한 다양한 로봇 유형과 환경에서 안전을 보장하는 핵심입니다.
모든 지역에서는 법에 의해 요구되지 않더라도 기업은 제 3 자 안전 전문가가 자신의 제품이 해당 표준을 충족하는지 여부를 확인하도록합니다. 이러한 방식으로 로봇 산업은 제품이 관련 표준을 준수한다는 기대를 강요함으로써 거의 기본적으로 표준 요구 사항을 시행합니다.
복잡하고 긴 표준을 탐색합니다
모바일 로봇, 센서 및 완전한 로봇 셀에 대한 표준이 있습니다. 또한 기계에서 대기업 통신을 가능하게하는 소프트웨어 표준이 있습니다. 내부 케이블에 이르기까지 모든 로봇 조각에 대한 표준이 있습니다. OEM 및 통합자를위한 표준이 있습니다. 마지막으로 최종 사용자에게도 알아야 할 표준이 있습니다.
표준은 종종 수백 페이지로 실행되며 자세히 설명합니다. 실제로 표준 준수의 일부는 복잡한 언어와의 씨름과 관련이 있습니다. 이것은 표준이 완전히 흡수 될 때까지 표준을 읽고 다시 읽는 것을 의미합니다.
예를 들어, 한 가지 중요한 차이점은“Sholl”(필요함)과“해야한다”(권장하는 것을 의미 함)의 차이를 중심으로합니다. 준수를 달성한다는 것은 표준 문서의 모든 문장과 하위 클라스를 통해 힘들게 노력하는 것을 의미합니다.
안전 표준에 가장 중요하고 널리 준수하는 것은 다음과 같습니다.
- ISO 12100 : 2010기본 용어, 원칙 및 기계 설계의 안전성을 달성하기위한 방법론을 지정하면서 위험 평가 및 위험 감소의 원칙을 요약하고 디자이너 가이 목표를 달성 할 수 있도록 지정합니다.
- ISO 3691-4 : 2023AMRS를 포함하는 용어 인 “무인 산업 트럭”에 대한 안전 요구 사항을 지정합니다.
- ISO 10218-1 : 2025산업용 로봇과 관련된 안전 요구 사항에 대한 지침을 설정하고 불과 몇 달 전에 상당한 업데이트를 받았습니다.
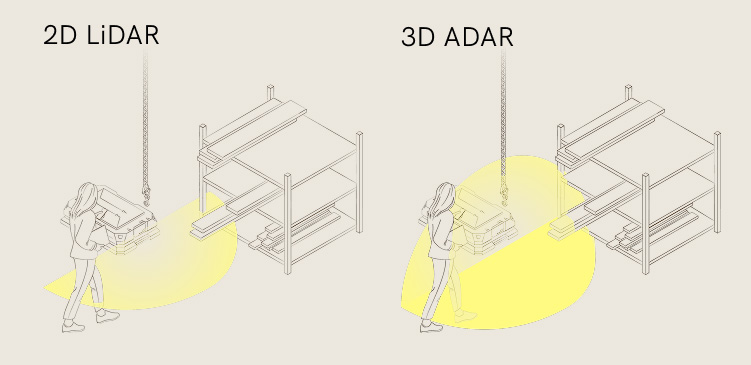
2D 안전 라이더는 일반적으로 AMR에 약 20cm (7.9 인치)의 높이에 장착되며 바닥 위의 10cm (3.9 인치), 지붕에 매달려있는 물체 또는 벽이나 선반에서 튀어 나오는 물건을 감지하지 않습니다. 이러한 제한 사항은 동적 상점에서 안전 위험을 나타냅니다. 다양한 조명 조건과 투명한 표면은 LIDAR에 도전을 만들 수 있습니다. 대조적으로, ADAR은 장면의 360도 (180 ° x 180 °)까지 5m (16.4 피트)까지의 장면을 제공하여 장애물 감지를위한 3D 안전 방패를 만듭니다. | 출처 : Sonair
Sonair는 센서 표준을 따릅니다
여기에서 우리에게 특히 관심이있는 표준 중 하나 Sonair ~이다 IEC 61496-1 : 2020. 이 문서는 안전 관련 시스템의 일환으로 사람이나 사람의 일부를 감지하기 위해 특별히 설계된 센서 (ESPE)의 비접촉, 전기에 민감한 보호 장비 (ESPE)의 설계, 구성 및 테스트에 대한 일반적인 요구 사항을 지정합니다.
이 문서는 인간과 인간의 일부를 포함하여 “장애물 탐지”에 사용되는 센서의 기능적 안전 요구 사항을 정의합니다. 다시 말해, AMR과 같은 로봇이 사람이나 재산을 감지 할 때 멈출 수있는 능력.
Sonair의 ADAR 센서는 장애물 감지를위한 것이므로 IEC 61496을 완전히 준수 할 것을 목표로하고 있습니다.
의 일부로 현장에서 테스트를받는 것 외에도 조기 액세스 프로그램Sonair 센서와 개발 프로세스는 독립 안전 전문가의 엄격한 평가를 받고 있습니다. 엑시다 그것은 ANSI-인증 표준 준수를 평가하고 인증하는 인증 기관. Exida의 엄격한 프로세스에는 제품 하드웨어 및 소프트웨어 설계의 안전 무결성 수준 (SIL)을 검증하는 것이 포함됩니다.
테스트 및 인증 프로세스는 힘들지만 두 가지 주요 이유가 필수적입니다. 첫째, 안전이 중요합니다. 오늘날과 미래의 성공적인 인간-로봇 상호 작용은 인간이 주변 로봇이 안전 위험을 제시하지 않는다는 것을 신뢰할 수있는 것에 달려 있습니다. 표준이 없으면 인간-로봇 공존은 전혀 없을 것입니다.
둘째, 안전 인증은 로봇 산업 전반에 걸쳐 표준입니다. 우리는 2025 년 말까지 타사 테스트 및 인증 프로세스를 완료 할 것으로 예상됩니다.
 저자에 대해
저자에 대해

{kind=link}
Britta Fismen은 노르웨이 오슬로에 본사를 둔 Sonair의 엔지니어링 담당 부사장 겸 공동 창립자입니다. 그녀는 Gassecure 및 Sintef의 고위 역할을 포함하여 센서 개발, 광학 및 연구 및 개발 분야에서 20 년 이상의 경험을 가지고 있습니다. Fismen은 M.Sc를 보유하고 있습니다. NTNU (Norwegian University of Science and Technology)의 응용 물리학 분야에서 광학 기기 및 무선 가스 탐지에서 획기적인 작업을 이끌었습니다.
게시물 안전한 인간 로봇 협력을위한 초보자 안내서 먼저 나타났습니다 로봇 보고서.