


Zenoh는 기술 전반에 걸쳐 확장 가능한 데이터 통신을 가능하게 하도록 설계된 미들웨어입니다. 출처: 제타스케일
ZettaScale Technology Ltd.에 따르면 여러 산업 분야에서 모바일 로봇의 이점을 누릴 수 있지만 표준 데이터 배포 서비스 또는 DDS 미들웨어는 무선 환경을 따라잡는 데 어려움을 겪고 있습니다. 이로 인해 통신 및 확장성이 제한된다고 프랑스에 본사를 둔 이 회사는 말했습니다.
ZettaScale은 차량, 사물 인터넷(Internet of Things)의 동적 환경에서 강력한 통신을 제공하는 Zenoh 프로토콜을 개발했습니다.IoT) 장치 및 로봇. 2022년에는 회사 항공우주 및 군사 응용 분야의 교통 통제를 위한 DDS 연구 개발에서 분리됨 안젤로 코르사로ZettaScale의 최고 기술 책임자 겸 CEO입니다.
지난달 이클립스재단 발표 Eclipse Zenoh 1.0.0 출시 오픈 소스 임베디드 시스템과 시스템 전반에 걸쳐 통신, 저장 및 계산을 통합하는 프로토콜 구름 플랫폼. 재단과 ZettaScale은 새 릴리스가 수년간의 작업과 실제 배포 경험을 바탕으로 구축되었다고 언급했습니다.
DDS는 잘 작동하지만 제한이 있습니다.
2015년에 차세대 인터넷을 위해 IP를 대체하기 위한 복원력 있는 프로토콜을 설계하려는 노력은 여전히 전화 회선 전환에 기반을 두고 있었습니다. DDS는 원래 의도에 맞게 최적화되었지만 한계가 있었다고 Corsaro는 말했습니다.
“우리 팀은 초기 스마트 시티 작업도 일부 수행했습니다. [such as] 프랑스에서는 니스(Nice), 바르셀로나에서는 슈나이더(Schneider), 시스코(Cisco)와 함께 있다”고 말했다. 로봇 보고서. “우리가 겪은 한 가지 어려움은 마이크로컨트롤러에서 데이터 센터에 이르는 시스템의 경우 데이터 흐름을 위해 2~3개의 서로 다른 프로토콜을 결합해야 한다는 것이었습니다. DDS는 마이크로컨트롤러에 적합하지 않으며 유선 프로토콜은 제한된 네트워크용으로 설계되지 않았습니다.”
Corsaro는 “문제는 DDS가 설계 공간 외부에서 사용되었다는 것입니다.”라고 설명했습니다. “DDS를 설계할 때 사용 사례는 폐쇄형 시스템, 유선 네트워크였으며 패킷 손실이 낮다는 가정이었습니다. 그리고 그것은 잘 설계된 시스템에서 일어납니다.”
“그래서 DDS는 완벽하게 균형잡힌 시스템을 갖춘 해군 전투 관리 시스템에서 나온 것입니다.”라고 그는 덧붙였습니다. “평균적으로 50%의 CPU와 비어 있는 네트워크가 있습니다. 그리고 멀티캐스트를 사용할 수 있고 패킷이 손실되지 않도록 모든 것이 조정되어 있습니다. 시스템은 강력하고 대칭적입니다. 그런 맥락에서 DDS는 흔들리지만, 그 맥락에서 벗어나면 복잡해집니다.”


정지 데이터와 이동 중인 데이터를 관리하도록 설계된 Zenoh
Corsaro는 두 가지 문제를 해결하고 싶다고 말했습니다. 첫 번째는 저전력 임베디드 시스템에서 작동하고 제한된 프로토콜을 개발하는 것이었습니다. 네트워크.
Corsaro는 “다른 아이디어는 이동 중인 데이터를 처리하는 데 사용하는 추상화를 통합하여 데이터와 저장 데이터, 즉 쿼리를 배포하는 것이었습니다.”라고 회상했습니다. 바르셀로나에서 “포그 컴퓨팅”을 위한 데이터 저장소를 분산시키려는 노력에서 그는 전 세계에 분산된 데이터를 검색하려면 프로토콜이 필요하다는 것을 발견했습니다. 회로망.
“제노 계산을 배포할 위치에 대한 토폴로지 제약을 제거하므로 인터넷 규모의 임의 메시를 통해 작업할 수 있습니다.”라고 Corsaro는 말했습니다. “클라우드와 엣지 중 어디에 배치해야 하는지에 대한 논의는 의미가 없는 곳에 스토리지와 컴퓨팅을 유지하고 데이터는 항상 최단 경로를 취하기 때문에 관련성이 없습니다.”

통신에서 ROS 2까지
DDS 연구원들은 통신 회사의 자금 지원을 받아 Zenoh 작업을 시작했으며, 이를 통해 Zenoh는 스마트 시티 원격 측정의 맥락에서 실험하고 검증할 수 있었습니다. 5G 네트워크라고 Corsaro는 말했습니다.
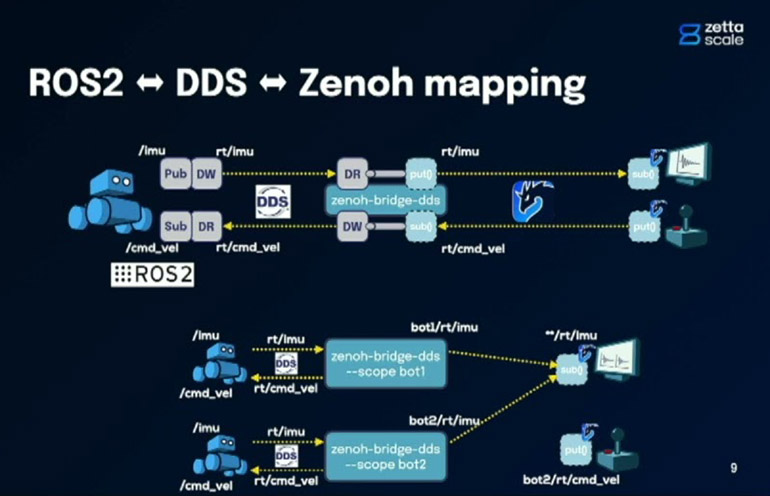
“사람들이 로봇 공학에 로봇을 사용하기 시작한 것은 우연이었습니다. 왜냐하면 우리는 통신에 중점을 두었기 때문입니다.”라고 그는 말했습니다. “우리가 ROS(오픈 소스)와 함께 이를 어떻게 사용할 수 있는지 보여주기 시작했을 때 [theopen-source로봇 운영체제], 정말 성공했습니다.”
ZettaScale이 분사되면서 TG Tech Auto는 자사의 프로토콜을 자동차 공간과 파트너십을 맺고 주주가 되었습니다.
Corsaro는 “우리는 로봇공학과 자동차 모두에서 거대한 융합을 목격하고 있으며 Zenoh는 General Motors의 uProtocol 이니셔티브에 채택되었습니다.”라고 말했습니다. “건축과 기술의 융합이죠. 실제로 오늘날 아시아에는 실제로 ROS 2에서 실행되는 자동차가 있습니다.”
ROS 2는 더 가벼운 “코드 우선” 접근 방식을 취하고 있는 반면, AUTOSAR 컨소시엄은 구조화된 교환 및 상호 운용성 형식을 연구하고 있습니다. 그러나 ROS 2는 자동차 인증 표준에 부합해야 한다고 Corsaro는 인정했습니다.
다음과 같은 회사 본질적인 그리고 Apex.AI 플랫폼을 연결하는 작업을 진행하고 있습니다. Intrinsic은 ROS 2 Jazzy Jalisco와 함께 Zenoh를 사용하고 있습니다.
Corsaro는 “매우 흥미로운 시간입니다.”라고 말했습니다. “로봇 플랫폼과 자율주행 모두에 동일한 프로토콜을 사용할 수 있다고 상상해 보세요. 우리는 로봇공학을 본질적으로 얼리 어답터라고 봅니다.”
제타스케일 시연 사이클론 DDS Zenoh, 버전 1.0.2가 현재 출시되었습니다. 사용 가능지난 달 일본 교토에서 열린 ROSCon에서.

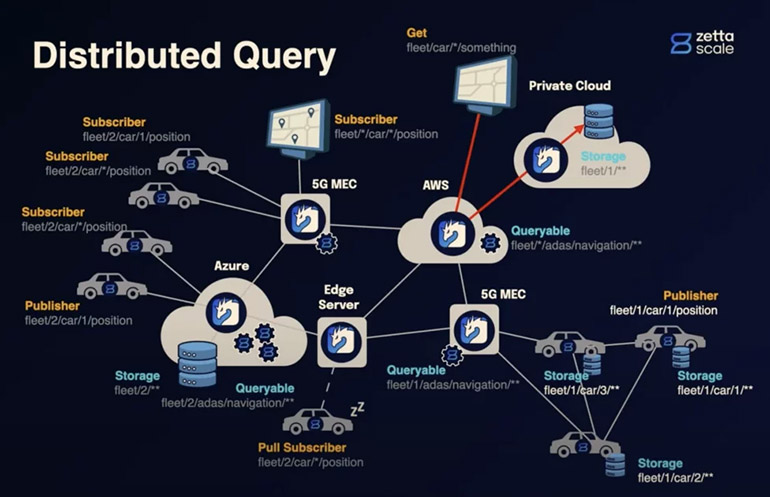
Zenoh는 효율적인 차량 관리를 위해 통신을 간소화하고 데이터를 적응적으로 라우팅하며 스토리지를 배포합니다. 출처: 제타스케일
ZettaScale은 자동차 작업을 계속합니다.
얼리 어답터 Zenoh에는 다음과 같은 주요 자동차 제조업체가 포함됩니다. 볼보 그리고 스마트시티 기업.
Eclipse Zenoh 1.0.0에는 공유 메모리 및 제로 복사 지원, 고급 종단 간 보호, 고성능 액세스 제어, 로봇 공학 및 자동차 프로토콜을 위한 특정 확장 기능이 포함되어 있습니다.
Corsaro는 “우리는 자율 주행 자동차의 실시간 비디오를 처리하고 루프에 인식 기능을 추가하는 방법을 보여주었습니다.”라고 말했습니다. “LiDAR 이미지, 포인트 클라우드 또는 큰 이미지를 보낼 때 네트워크를 통과하고 싶지 않지만 제로 카피 API를 사용하는 사람은 거의 없었습니다. [application programming interface] 그건 ROS에 있었어.”
ZettaScale은 일본 및 유럽의 파트너와 긴밀히 협력하고 있으며 미국에 지원 인력이 있습니다.

게시물 ZettaScale은 자동차, ROS 통신용 DDS를 초월하도록 Zenoh를 설계합니다. 처음 등장한 로봇 보고서.