


듀크 대학의 연구원들은 진동을 “듣고” 로봇에게 촉감을 주는 SonicSense라는 시스템을 개발했습니다. 연구원들은 이를 통해 로봇이 재료를 식별하고, 모양을 이해하고, 물체를 인식할 수 있다고 말했습니다.
SonicSense는 네 손가락을 가지고 있습니다. 로봇 손 각 손가락 끝에 접촉식 마이크가 내장되어 있습니다. 이 센서는 로봇이 물체를 두드리거나 잡거나 흔들 때 발생하는 진동을 감지하고 기록합니다. 그리고 마이크가 물체와 접촉하기 때문에 로봇이 주변 소음을 조절할 수 있습니다.
“오늘날 로봇은 대부분 세상을 해석하기 위해 시각에 의존합니다.”라고 Jiaxun Liu는 설명했습니다. 논문의 주요 저자 그리고 1년차 박사 학위. Duke 대학의 기계 공학 및 재료 과학 교수인 Boyan Chen 연구실의 학생입니다. “우리는 일상적으로 발견되는 복잡하고 다양한 물체를 다룰 수 있는 솔루션을 만들고 싶었고, 이를 통해 로봇이 세상을 ‘느끼고’ 이해할 수 있는 훨씬 더 풍부한 능력을 제공하고 싶었습니다.”
상호작용과 감지된 신호를 기반으로 소닉센스 주파수 특성을 추출하고 AI의 최신 발전과 결합된 이전 지식을 사용하여 물체가 어떤 재료로 만들어졌는지, 3D 모양을 파악합니다. 연구자들은 시스템이 이전에 본 적이 없는 물체라면 시스템이 결론을 내리기까지 20가지의 서로 다른 상호 작용이 필요할 수 있다고 말했습니다. 그러나 데이터베이스에 이미 있는 개체인 경우에는 4개만 있어도 정확하게 식별할 수 있습니다.
“SonicSense는 로봇에게 인간과 마찬가지로 듣고 느낄 수 있는 새로운 방법을 제공합니다. 이는 현재의 로봇이 물체를 인식하고 상호 작용하는 방식을 변화시킬 수 있습니다”라고 전기, 컴퓨터 공학, 컴퓨터 과학 분야의 학생과 약속이 있는 Chen은 말했습니다. “시력은 필수적이지만 소리는 눈이 놓칠 수 있는 것들을 드러낼 수 있는 정보의 층위를 추가합니다.”
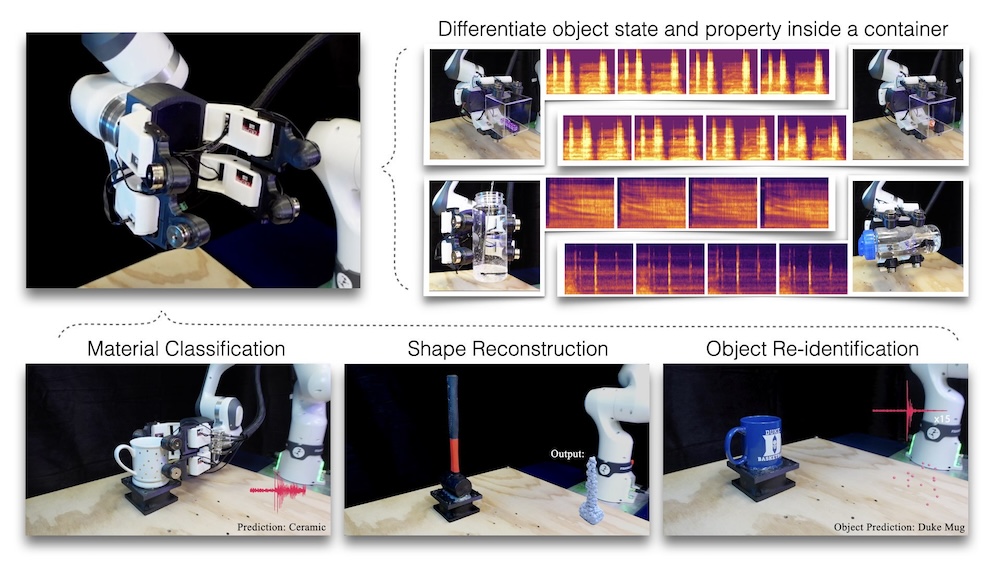

Chen과 그의 연구실에서는 SonicSense가 지원하는 다양한 기능을 선보였습니다. 주사위가 담긴 상자를 돌리거나 흔들면 그 안에 들어 있는 숫자와 모양을 셀 수 있습니다. 물병에도 똑같이 하면 그 안에 액체가 얼마나 들어 있는지 알 수 있다. 그리고 인간이 어둠 속에서 물체를 탐색하는 것과 마찬가지로 물체 외부를 두드리면 물체 모양을 3D로 재구성하고 물체가 어떤 재료로 만들어졌는지 확인할 수 있습니다.
Liu는 “대부분의 데이터 세트는 통제된 실험실 설정이나 사람의 개입을 통해 수집되지만 개방형 실험실 환경에서 독립적으로 개체와 상호 작용할 수 있는 로봇이 필요했습니다.”라고 말했습니다. “시뮬레이션에서 그 정도 수준의 복잡성을 재현하는 것은 어렵습니다. 제어된 데이터와 실제 데이터 사이의 이러한 격차는 매우 중요하며 SonicSense는 로봇이 물리적 세계의 다양하고 지저분한 현실과 직접 상호 작용할 수 있도록 함으로써 이를 연결합니다.”
팀은 이러한 능력이 SonicSense를 로봇이 역동적이고 구조화되지 않은 환경에서 물체를 인식하도록 훈련하기 위한 강력한 기반으로 만든다고 말했습니다. 비용도 마찬가지입니다. Duke University에 따르면 음악가들이 기타 사운드를 녹음하는 데 사용하는 것과 동일한 접촉 마이크, 3D 프린팅 및 기타 상용 구성 요소를 사용하면 건설 비용이 200달러가 조금 넘는다고 합니다.
연구원들은 여러 개체와 상호 작용하는 시스템의 능력을 향상시키기 위해 노력하고 있습니다. 객체 추적 알고리즘을 통합함으로써 로봇은 역동적이고 복잡한 환경을 처리할 수 있어 실제 작업에서 인간과 같은 적응성에 더 가까워질 수 있습니다.
또 다른 주요 개발은 로봇 손 자체의 설계에 있습니다. “이것은 시작에 불과합니다. 앞으로 우리는 SonicSense가 능숙한 조작 기술을 갖춘 더욱 발전된 로봇 손에 사용되어 로봇이 미묘한 터치 감각이 필요한 작업을 수행할 수 있게 되기를 기대합니다.”라고 Chen은 말했습니다. “우리는 더욱 복잡한 상호 작용을 위해 압력 및 온도와 같은 다양한 감각 양식을 통합하기 위해 이 기술을 어떻게 추가로 개발할 수 있는지 알아보게 되어 기쁩니다.”

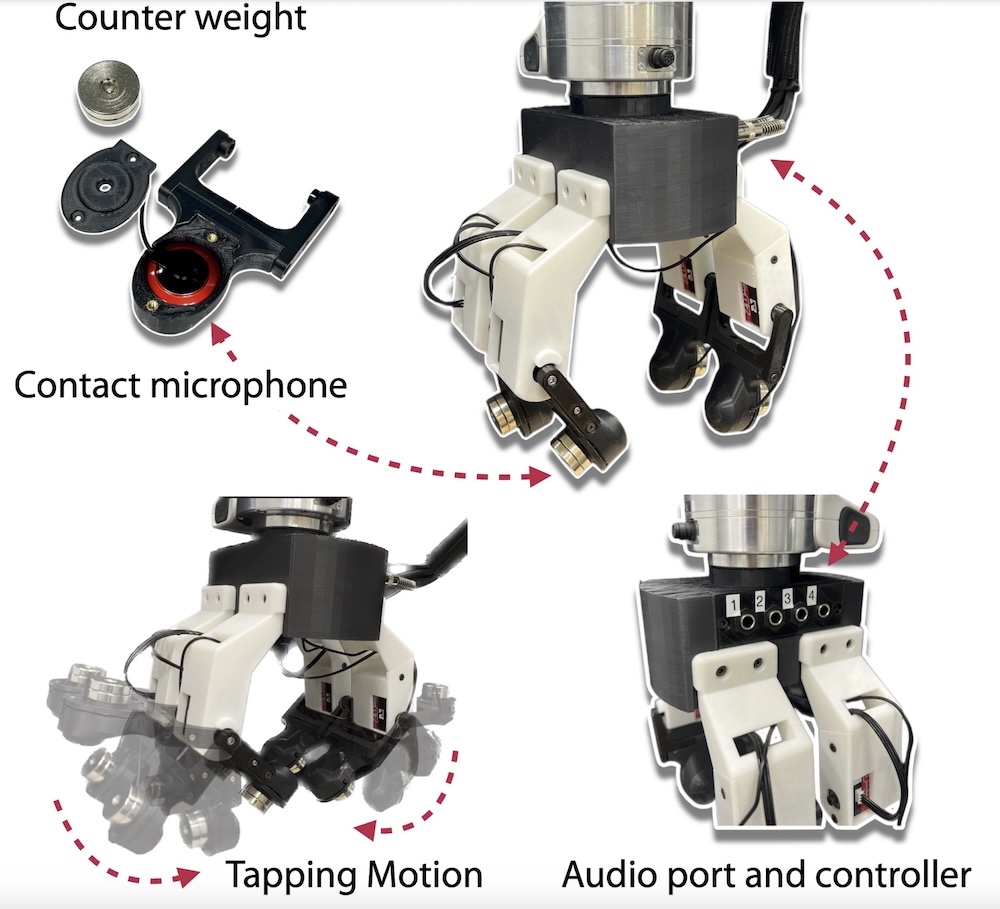
SonicSense 로봇 손에는 4개의 손가락이 있으며 각 손가락 끝에는 하나의 접촉 마이크가 장착되어 있습니다. | 크레딧: 듀크 대학교
게시물 SonicSense 로봇 손은 음향 진동을 통해 물체를 인식합니다. 처음 등장한 로봇 보고서.