{kind=link}


Nvidia GTC의 2 일째가 우리 뒤에 있습니다. 오늘의 하이라이트는 산호세 아레나에서 열린 Nvidia CEO Jensen Huang의 기조 연설이었습니다. 경기장은 약 16,000 명의 참석자와 함께 서까래에 포장되었습니다. Huang은 거의 2 시간 동안 발표했으며, 어느 시점에서 Disney BDX 로봇을 무대에 올렸습니다.
Disney BDX 로봇은 군중을 즐겁게했으며 Nvidia CEO Jensen Huang은 새로운 로봇 제품에 대해 논의했습니다. | 크레딧 : 로봇 보고서
이 세션은 로봇 공학 뉴스를 다루었지만 Huang의 프레젠테이션의 주요 초점은 작년에 Deepseek 출시가 실제로 큰 일이라는 주류 미디어를 설득하는 것이 었습니다. Nvidia ‘s 사업. NVIDIA는 NVIDIA 아키텍처를 기반으로 AI 워크 플로우를 실행하기 위해 최적화 된 다음 데이터 센터 반복 인 “AI Factories”로 정의되는 내용에 있습니다.
기조 연설 의이 부분은 AI 추론을 이전 세대보다 40 배 빠르게 만들기 위해 설계된 새로운 Blackwell Chip과 새로운 “Dynamo”소프트웨어를 강조했습니다.
로봇 공학은 기조 연설의 하이라이트입니다
Huang은 Nvidia와 GM과의 파트너십을 시작으로 차세대 차량, 자동차 공장 및 로봇을 개발하기 위해 Nvidia와 GM과 파트너십을 시작으로 몇 가지 중요한 로봇 공학 발표를했습니다.
또한 Nvidia는 오픈 소싱이라고 발표했습니다 Gr Mil3t N1. 나중에 그날, 나는 Nvidia Omniverse의 수석 제품 마케팅 관리자 인 Akhil Docca와 함께이 발표의 중요성을 논의 할 기회를 가졌습니다.
NVIDIA는 다양성을 위해 GR00T N1을 설계하여 단일 기초 모델이 다양한 휴머노이드 로봇에 전력을 공급할 수 있도록합니다. 개발자는 특정 응용 프로그램을 위해 IT를 미세 조정하고 합성 데이터 생성 기능을 활용하여 교육 데이터 세트를 향상시킬 수 있습니다. 포옹 페이스와 같은 플랫폼에서 모델을 오픈 소싱함으로써 접근성이 증가하여 연구원과 개발자의 장벽을 낮 춥니 다.
이 모델은 다양한 시나리오에서 인식, 추론 및 행동이 가능한 일반 기술로 이동함으로써 AI 로봇 공학을 발전시킵니다. 이 접근법은 여러 작업을 수행 할 수있는 단일의 적응 가능한 AI 프레임 워크를 제공하여보다 다재다능하고 지능적인 로봇의 개발을 촉진하여 혁신을 가속화하는 것을 목표로합니다.
개발자는 이제 특정 사용 사례에 대한 모델을 미세 조정하여 다양한 로봇 응용 프로그램에보다 적응할 수 있습니다. 이 모델에는 합성 데이터를 생성하기위한 청사진이 제공되어 다양한 교육 데이터 세트를 확장하고 다양한 환경에서 로봇 성능을 향상시킵니다.
Nvidia가 발표했습니다 코스모스 올해 초 CES에서는 GTC에서 Huang은 코스모스 로봇 개발을 위해. NVIDIA COSMOS는 최첨단 생성 세계 재단 모델 (WFMS), 고급 토큰 화제, 가드 레일 및 가속화 된 데이터 처리 및 큐 레이션 파이프 라인의 플랫폼입니다. 세계 모델 교육을 강화하고 자율 주행 차량 (AVS) 및 로봇의 물리적 AI 개발을 가속화하도록 만들어졌습니다.
Huang도 발표했다 뉴턴Nvidia, Google Deepmind에서 개발중인 오픈 소스, 확장 가능한 물리 엔진 및 디즈니 연구 로봇 학습 및 개발을 발전시키기 위해. 이것이 Huang이 Disney BDX 로봇을 무대에 초대 한 이유입니다.
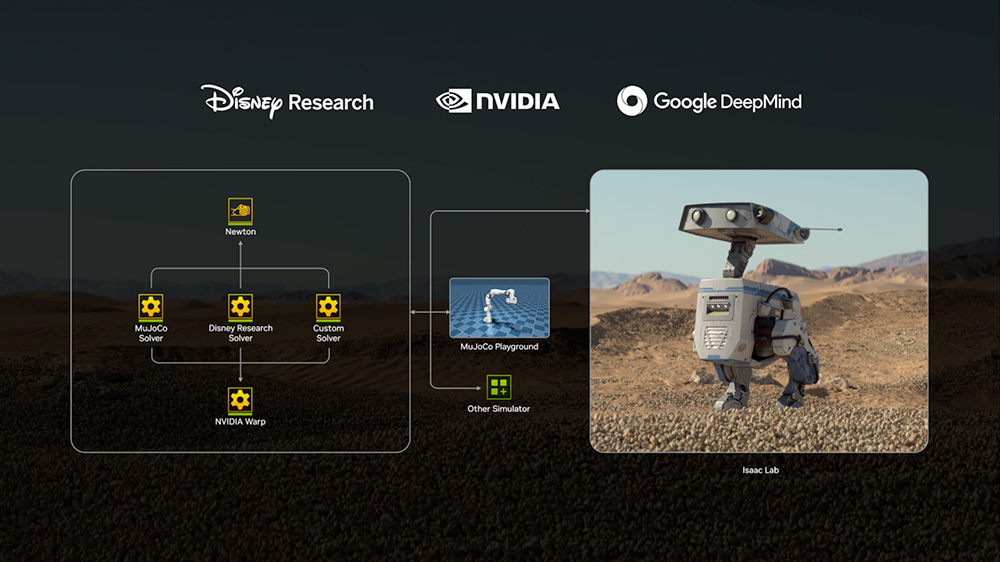
Nvidia Newton 다이어그램. | 크레딧 : Nvidia
Newton은 로봇 연구 개발에 널리 사용되는 오픈 소스 물리 엔진 인 Mujuco와 호환됩니다. 특히 복잡한 역학 및 접촉이 풍부한 환경이 포함됩니다.
코스모스와 뉴턴의 발표에서 Docca는 다음과 같이 말했습니다 :“그 기원은 실제로 인간형 로봇을위한이 차세대 오픈 소스 물리 엔진을 구축하는 것이 었습니다.이 아이디어는 로봇이 어떻게 가로 지르는 모션으로, 마찰 로봇에 적용 할 수있는 물리학을 가져올 수 있어야했습니다.
민첩성 로봇 공학과 보스턴 역학은 새로운 NVIDIA 향상을 발표합니다
어제, 민첩성 로봇 공학 발표 된 회사는 또한 Nvidia Omniverse Blueprint 인“Mega”를 통해 파트너가 숫자 모델을 이용할 수 있도록 협력하고 있습니다.
기초 모델을 사용하는 것은 숫자와 같은 다목적 플랫폼을 세계에 가져 오는 속도와 일반성 측면에서 게임 체인저입니다. 오늘 뉴스의 일부 하이라이트에는 다음이 포함됩니다.
- 민첩성은 인식 및 제어를 위해 AI 모델을 실행하는 NVIDIA ACCELERATOR (GPU)가 있습니다.
- 민첩성은 Isaacsim과 Isaaclab을 사용하여 클라우드에서 오프라인으로 AI 모델을 훈련시킵니다.
- 민첩성은 최근 발표 된 NVIDIA MEGA 플랫폼 (ISAACSIM 위에 구축 된 대규모 시뮬레이터)을 지원하여 Schaeffler와 같은 고객이 시설 규모의 디지털 쌍둥이에 숫자를 넣을 수 있도록 노력하고 있습니다.
별도의 발표에서 보스턴 역학 NVIDIA와의 협력을 확장하여 Humanoid 로봇을위한 차세대 AI 기능을 구축했다고 밝혔다. Nvidia Isaac GR00T 플랫폼의 얼리 어답터 인 Boston Dynamics의 Atlas Robot은 Nvidia Jetson Thor Computing 플랫폼을 사용하는 많은 휴머노이드 중 하나입니다.
Jetson Thor의 소형 크기, 고성능 및 효율성을 통해 Atlas는 Boston Dynamics의 전신 및 조작 컨트롤러와 완벽하게 작동하는 복잡한 멀티 모달 AI 모델을 실행할 수 있습니다.
Boston Dynamics와 그 연구 파트너의 개발자들은 또한 NVIDIA Isaac SIM 및 NVIDIA OMNIVERSE 기술을 기반으로하는 물리적으로 정확한 가상 환경에서 오픈 소스, 로봇 학습을위한 오픈 소스, 모듈 식 프레임 워크 인 Isaac Lab, 모듈 식 모듈 식 프레임 워크를 사용하여 학습 된 손재주 및 운동 AI 정책에 빠르게 돌파구를 만들고 있습니다. 두 회사는 NVIDIA의 교육 및 시뮬레이션 플랫폼을 사용한 주요 학습 및 컴퓨터 비전 파이프 라인뿐만 아니라 기능 안전 및 보안 아키텍처를 포함한 주요 플랫폼 매개 변수를 정의하기 위해 협력하고 있습니다.
Ken Goldberg 박사는 그의 세션을 즐겁게합니다
Ken Goldberg 박사는 GTC 2025 세션에 이어 질문으로 팬들로 둘러싸여있었습니다. | 크레딧 : 로봇 보고서
내가 오후에 참석 한 세션 중 하나는 켄 골드버그 박사의“실제 로봇 혁명을 불러 일으키는 데 데이터 격차를 닫아야한다”였습니다. 세션은 순수한 골드버그 였고, 골드버그가 덱스 넷의 발전에 관한 역사 수업을 통해 우리를 데려 가면서 방에 서있는 방이었습니다. Ambi Robotics지난 5 년간 AI의 혁신 속도. 비디오가 공개되면 재생할 가치가있는 세션입니다. Goldberg는 또한 2025 년 1 월 2025 년 예측 웹 세미나의 손님으로, Replay를 보았습니다. 여기.
Nvidia는 도시를 점령합니다

Nvidia CEO Jensen Huang은 산호세의 South Market Street에있는 GTC 애프터 파티에서 Hewlett Packard Enterprise CEO Antonio Neri와 함께 무대에 있습니다. | 크레딧 : 로봇 보고서
작년은 전염병에 이어 GTC의 물리적 사건의 귀환을 표시했습니다. 올해이 행사는 산호세 컨벤션 센터 (SJCC)에서 쏟아져 SJCC 주변의 블록을 위해 거리를 채우고 있습니다. 이 행사는 First Street와 Almaden Blvd 사이의 South Market 에서이 지역을 완전히 차단하고 게이트했습니다. 점심 시간 에이 지역은 20,000 명 이상의 참석자에게 먹이를주기 위해 푸드 트럭으로 가득 차 있으며, 밤에는 음식과 공예품 공급 업체가있는 야시장과 라이브 음악이있는 무대가 있습니다.
게시물 Nvidia GTC Day 2의 가장 큰 로봇 뉴스 먼저 나타났습니다 로봇 보고서.