


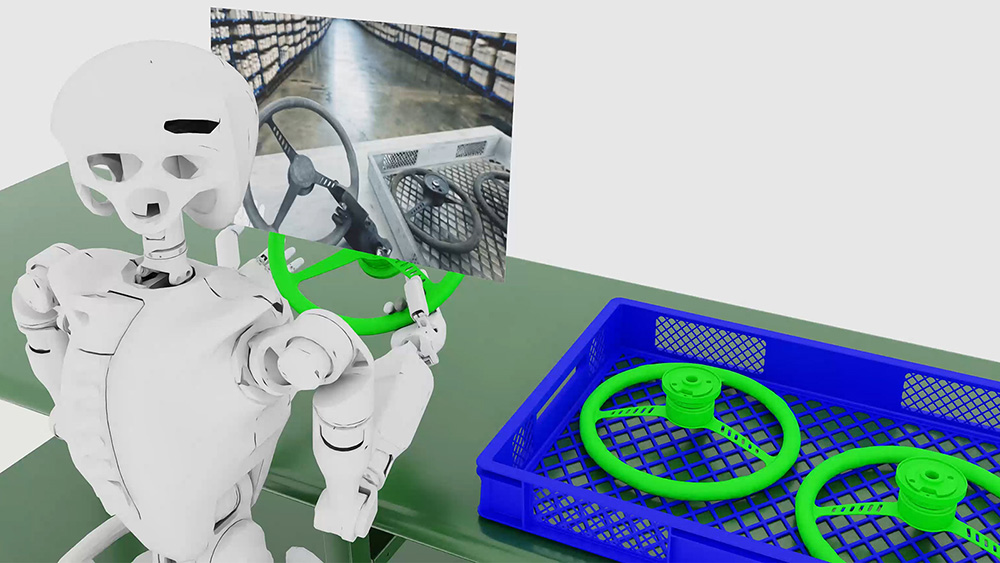
인간 작업자, 로봇 및 에이전트 시스템, 장비를 시설 디지털 트윈에 통합합니다. | 출처: Accenture, KION 그룹.
NVIDIA Corp.의 CEO인 Jensen Huang은 어제 라스베이거스에서 열린 CES 2025에서 수많은 발표를 했습니다. 여기에는 산업용 로봇 함대 디지털 트윈 구축을 위한 Mega Omniverse 청사진, Omniverse에 생성적 물리적 AI 추가, Cosmos World Foundation Model 플랫폼 출시, Isaac 플랫폼 업데이트 출시 등이 포함되었습니다.
이번 발표는 NVIDIA가 어떻게 투자를 두 배로 늘리고 있는지를 보여줍니다. 인공지능 로봇 공학을 위한 기술, 특히 생성 AI. 신제품 외에도 캘리포니아주 산타클라라에 본사를 둔 회사 라고 발표했다 토요타, 오로라그리고 콘티넨털 NVIDIA 컴퓨팅 및 AI를 사용하여 소비자 및 상업용 차량을 개발하고 있습니다.
NVIDIA는 또한 자사의 DRIVE Hyperion 플랫폼이 중요한 성과를 거두었다고 밝혔습니다. 자동차 안전 및 사이버 보안 이정표. 이 플랫폼은 자동차 등급 안전 및 사이버 보안 분야의 두 산업 당국인 TÜV SÜD와 TÜV Rheinland의 산업 안전 평가를 통과했다고 밝혔습니다.
회사의 “엔드 투 엔드” 시스템에는 DRIVE AGX 시스템 온 칩(SoC) 및 레퍼런스 보드 설계, NVIDIA DriveOS 자동차 운영 체제, 센서 제품군, 능동 안전 및 SAE 레벨 2+ 드라이빙 스택.
NVIDIA 업데이트 Omniverse

엔비디아, 옴니버스 메가(Mega) 발표 대규모의 물리적 AI 및 로봇 함대를 개발, 테스트 및 최적화하기 위한 청사진 디지털 트윈 실제 시설에 배포하기 전에.
Mega는 기업에 가속 컴퓨팅, AI, NVIDIA의 참조 아키텍처를 제공합니다. 이삭그리고 NVIDIA Omniverse 기술을 사용한다고 회사측은 밝혔습니다. 이를 통해 로봇, 비디오 분석, AI 에이전트, 장비 등을 구동하는 AI 기반 “두뇌”를 테스트하기 위한 디지털 트윈을 개발하고 테스트할 수 있습니다.
NVIDIA는 새로운 Omniverse를 추가했습니다. 뼈대 엄청난 복잡성과 규모를 처리할 수 있습니다. 소프트웨어 정의 기능을 물리적 시설에 도입하여 지속적인 개발, 테스트, 최적화 및 배포를 가능하게 한다고 회사는 밝혔습니다.
세계를 포함한 메가 중심의 디지털 트윈으로 모의 실험 장치 엔비디아는 모든 로봇 활동과 센서 데이터를 조정함으로써 기업이 지능적인 경로와 작업 효율성을 위해 로봇을 지속적으로 업데이트할 수 있다고 밝혔습니다.
청사진은 Omniverse를 사용합니다. 클라우드 센서 RTX 개발자가 고충실도 대규모 센서 시뮬레이션을 위해 공장에 있는 모든 유형의 지능형 기계의 데이터를 동시에 렌더링할 수 있도록 하는 애플리케이션 프로그래밍 인터페이스(API). 이를 통해 NVIDIA가 포함된 Software-in-the-Loop 파이프라인의 합성 데이터를 사용하여 디지털 트윈 내에서 무한한 수의 시나리오에서 로봇을 테스트할 수 있습니다. 아이작 로스.
NVIDIA는 또한 NVIDIA Omniverse 통합을 로봇공학, 자율주행차와 같은 물리적 AI 애플리케이션으로 더욱 확장하기 위한 생성적 AI 모델과 청사진을 발표했습니다.AV), 그리고 비전 일체 포함. 회사는 이 모델이 다음을 포함하여 물리적 AI 시뮬레이션을 위한 3D 세계를 만드는 각 단계를 가속화한다고 말했습니다. 세계를 건설하고, 세계에 물리적 특성을 부여하고, 사진처럼 현실적으로 만듭니다.
“물리적 AI는 50조 달러 규모의 제조 및 물류 산업에 혁명을 일으킬 것입니다. 자동차와 트럭부터 공장과 창고에 이르기까지 움직이는 모든 것이 로봇으로 구현되고 AI로 구현될 것입니다.”라고 Huang은 말했습니다. “NVIDIA의 Omniverse 디지털 트윈 운영 체제와 Cosmos 물리적 AI는 세계의 물리적 산업을 디지털화하기 위한 기본 라이브러리 역할을 합니다.”
코스모스 월드 기반 모델은 물리적 AI 개발을 가속화하는 것을 목표로 합니다.
1X, Agile Robots, Agility, Figure AI, Foretellix, Fourier, Galbot, Hillbot, IntBot, Neura Robotics, Skild AI, Uber, Virtual Incision, Waabi 및 XPENG를 포함한 회사가 Cosmos를 가장 먼저 채택했습니다. | 출처: 엔비디아
Omniverse 업데이트 외에도 NVIDIA는 다음도 출시했습니다. 코스모스, AV 및 로봇과 같은 물리적 AI 시스템의 개발을 발전시키기 위해 구축된 생성적 세계 기반 모델, 고급 토크나이저, 가드레일 및 가속화된 비디오 처리 파이프라인으로 구성된 플랫폼입니다.
회사는 물리적 AI 모델을 개발하는 데 비용이 많이 들고 방대한 양의 실제 데이터와 테스트가 필요하다고 주장했습니다. Cosmos 세계 기반 모델(WFM)은 개발자에게 엄청난 양의 사실적인 물리 기반 모델을 생성할 수 있는 쉬운 방법을 제공합니다. 합성 데이터 기존 모델을 훈련하고 평가합니다. 개발자는 Cosmos WFM을 미세 조정하여 맞춤형 모델을 구축할 수도 있습니다.
NVIDIA는 Cosmos의 개방형 모델 제품군을 통해 개발자가 대상 애플리케이션의 요구 사항에 따라 AV 여행의 비디오 녹화 또는 창고를 탐색하는 로봇과 같은 데이터 세트로 WFM을 사용자 정의할 수 있다고 언급했습니다.
회사는 물리적 AI 연구 및 개발을 위해 WFM을 설계했다고 밝혔습니다. WFM은 텍스트, 이미지, 비디오뿐만 아니라 로봇 센서 또는 모션 데이터와 같은 입력 조합을 통해 물리 기반 비디오를 생성할 수 있습니다.
“로봇 공학을 위한 ChatGPT 순간이 다가오고 있습니다. 대규모 언어 모델과 마찬가지로 세계 기반 모델은 로봇 및 AV 개발 발전의 기본이지만 모든 개발자가 자신을 교육할 전문 지식과 리소스를 갖춘 것은 아닙니다.”라고 Huang은 말했습니다. “우리는 물리적 AI를 민주화하고 모든 개발자가 일반 로봇 공학을 이용할 수 있도록 하기 위해 Cosmos를 만들었습니다.”
NVIDIA는 Cosmos 모델이 로봇 공학, AI 및 AV 커뮤니티의 작업을 가속화하기 위해 개방형 모델 라이선스에 따라 제공될 것이라고 밝혔습니다. 개발자는 NVIDIA API 카탈로그에서 첫 번째 모델을 미리 보거나 NVIDIA NGC 카탈로그에서 모델 제품군 및 미세 조정 프레임워크를 다운로드할 수 있습니다. 포옹하는 얼굴.

NVIDIA도 Isaac을 수정했습니다.
엔비디아 아이작(NVIDIA Isaac)은 가속 라이브러리, 애플리케이션 프레임워크, AI 모델로 구성된 플랫폼으로, AI 로봇 개발을 가속화할 수 있다고 밝혔습니다. Isaac Sim, Isaac Lab, Isaac Manipulator 및 Isaac Perceptor의 네 가지 응용 프로그램으로 구성됩니다.
엔비디아 아이작 심 사용자가 물리 기반 가상 환경에서 AI 기반 로봇을 개발, 시뮬레이션 및 테스트할 수 있도록 하는 NVIDIA Omniverse를 기반으로 구축된 참조 애플리케이션입니다. Isaac Sim 4.5는 다음을 포함하여 여러 가지 중요한 변경 사항을 제공합니다.
- 참조 애플리케이션 템플릿
- 향상된 URDF(Unified Robot Description Format) 가져오기 및 설정
- 향상된 물리 시뮬레이션 및 모델링
- 새로운 관절 시각화 도구
- 시뮬레이션 정확도 및 통계
- NVIDIA Cosmos 월드 기반 모델
엔비디아 아이작 랩 로봇 정책을 훈련하기 위한 로봇 학습을 위한 오픈 소스 통합 프레임워크입니다. Isaac Lab은 NVIDIA Isaac Sim을 기반으로 구축되어 개발자와 연구자가 강력하고 인식이 가능한 시뮬레이션 교육 정책을 통해 지능적이고 적응 가능한 로봇을 보다 효율적으로 구축할 수 있도록 지원합니다. Isaac Lab의 업데이트된 버전에는 타일 렌더링 및 기타 삶의 질 향상과 같은 성능 및 유용성 개선 사항이 포함되어 있습니다.
NVIDIA 아이작 매니퓰레이터기반 로스 2는 NVIDIA의 컬렉션입니다. 쿠다-가속화된 라이브러리, AI 모델 및 참조 워크플로우. 이제 선택 및 배치 및 객체 추적을 위한 새로운 엔드투엔드 참조 워크플로가 포함되어 사용자가 객체 추적 및 선택 및 배치를 포함한 기본적인 산업용 로봇 암 작업을 빠르게 시작할 수 있습니다.
마지막으로, 엔비디아 아이작 퍼셉터역시 ROS 2를 기반으로 구축된 는 자율 모바일 로봇 개발을 위한 라이브러리, 모델 및 참조 워크플로우 모음입니다(AMR). 이를 통해 AMR은 다음과 같은 구조화되지 않은 환경에서 인식, 위치 파악 및 작동할 수 있습니다. 창고 아니면 공장.
NVIDIA는 최신 업데이트가 동적 설정에서 AMR 환경 인식과 운영 효율성을 크게 향상시킨다고 밝혔습니다. 여기에는 새로운 엔드투엔드 SLAM(Visual Simultaneous Localization and Mapping) 참조 워크플로우, 사람 감지 및 동적 장면 요소를 사용한 3D 장면 재구성을 위해 여러 대의 카메라로 nvblox를 실행하는 새로운 예, 다음을 실행하여 향상된 D 장면 재구성이 포함됩니다. 아이작 퍼셉터 여러 RGB-D 카메라에서.


게시물 NVIDIA, CES에서 Omniverse 업그레이드, Cosmos 기반 모델 등 공개 처음 등장한 로봇 보고서.