
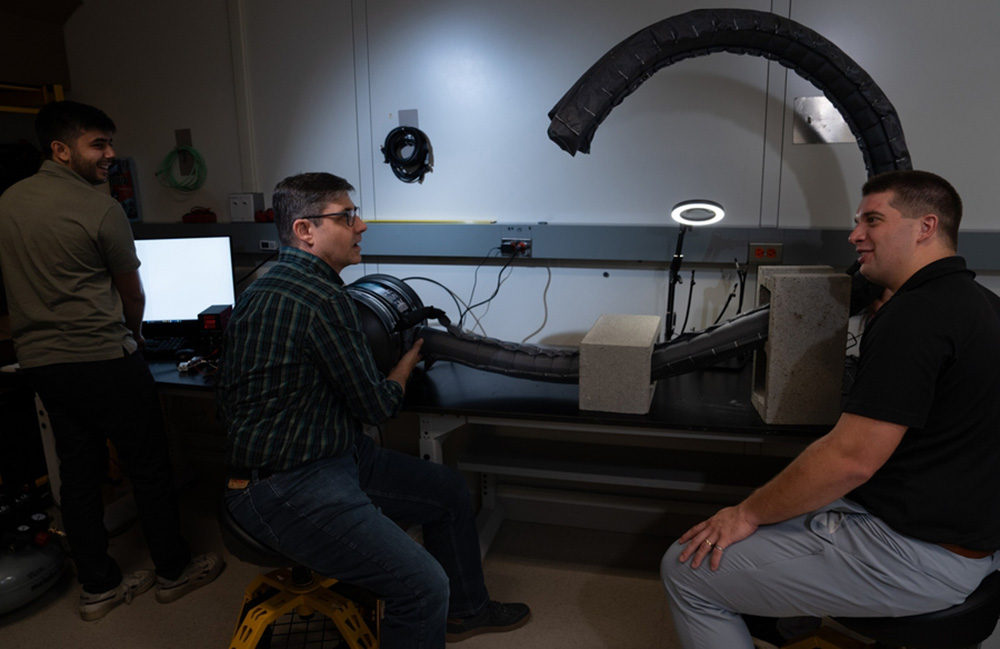
왼쪽에서 오른쪽으로 : 연구 인턴 Ankush Dhawan과 Lincoln 실험실 직원 Chad Council과 Nathaniel Hanson은 실험실 환경에서 포도 나무 로봇을 테스트합니다. | 출처 : Glen Cooper, MIT News
MIT Lincoln Laboratory의 연구원들은 University of Notre Dame과 협력하여 잔해 사이를 압박 할 수있는 포도 나무 같은 로봇을 만들었습니다. 로봇은 비참한 구조적 붕괴에 따라 비상 대응 자의 부담을 쉽게 할 수 있습니다.
주요 재난이 발생하면 비상 대응자는 잔해에 갇힌 사람들을 찾아서 위험한 환경에서 이러한 희생자들을 신중하게 퇴장시킬 책임이 있습니다. 이 잔인하고 24 시간 일은 재난의 규모에 따라 며칠 또는 몇 주 동안 연장 될 수 있습니다.
하는 동안 다리 로봇 이미 재난 회복 상황에서 잔해 상단을 조사하기 위해 이미 일하고 있으며, 불안정한 위치에서 손상 될 수 있습니다. 공동 연구팀은 소프트 패스 파인딩 로봇 관찰 장치 또는 새싹을 만들었습니다. 이 새로운 시스템은 장애물과 작은 공간을 통해 기동 할 수 있습니다.
그만큼 소프트 로봇 공기로 팽창하고 수축시켜 붕괴 된 구조물 아래에서 길을 갈 수 있습니다. 그만큼 와 함께–우리 성모 연구원들은 비상 대응 자들이이를 원격으로 통제하여 잔해를 통해 최적의 수입 경로를 탐색,지도 및 찾을 수 있다고 말했다. 또한 저렴하고 작동하기 쉽도록 설계되었습니다.
새싹 팀의 일원이자 기술 직원 인 Chad Council은“도시의 수색 및 구속 환경은 잔인하고 용서할 수 있습니다. 링컨 실험실말했다 MIT 뉴스. “포도 나무 로봇이 작동하는 근본적인 방법은 다른 플랫폼이 직면 한 많은 도전을 완화시킵니다.”
Sprout은 Notre Dame 대학교 교수 인 Margaret Coad와 MIT 졸업생과 공동으로 개발되었습니다. 공동 작업자를 찾을 때 Notre Dame을 졸업 한 Nathaniel Hanson은 이미 산업 검사를위한 Vine Robot에 대한 COAD의 작업을 이미 알고있었습니다.
디자인은 새싹에 직면 한 MIT에 도전합니다
새싹은 밀폐 된 직물의 풍선 튜브로 구성되어 있습니다. 튜브는 배치를 제어하는 모터로 고정 된베이스에서 펼쳐집니다. 튜브 끝에서 팀은 카메라 및 기타 센서를 장착했습니다. 튜브가 팽창함에 따라 잔해로 확장되어 단단한 구절을 꽉 쥐고 센서는 이미지를 이미지화하고 환경을 매핑합니다.
현재 새싹은 조이스틱과 로봇의 카메라 피드를 표시하는 화면을 사용하여 작동 할 수 있습니다. 최대 10 피트 (3m)까지 배치 할 수 있으며 팀은 25 피트 (7.6m)로 확장하기 위해 노력하고 있습니다.
Sprout의 Flexible Design은 작은 공간에 들어갈 수 있지만 연구원들에게도 여러 가지 기술적 인 과제를 제시했습니다. 예를 들어, 팀은 변형 가능한 로봇 내에 공기압을 적용하는 방법을 정확히 찾아서 운영자가 이동하도록 지시하는 곳으로 이동할 수있는 제어 시스템을 만들어야했습니다.
또한 팀은 로봇이 성장하고 조향을위한 컨트롤을 엔지니어링하는 동안 마찰을 최소화하기 위해 튜브를 설계해야했습니다.

{kind=link}
붕괴 된 지역의지도 및 테스트 새싹
MIT 팀은 모바일 로봇을 텔레오퍼 지하 공극의 맵을 구축하는 시스템.
Hanson은“붕괴 이벤트는 드물지만 치명적인 사건입니다. “로봇 공학에서 우리는 일반적으로 접근법 측정이 우리의 접근 방식을 검증하기를 원하지만 단순히 붕괴 된 구조에는 존재하지 않습니다.”
이 문제를 해결하기 위해 Hanson과 그의 팀은 붕괴 된 구조의 현실적인 묘사를 만들고 빈 공간을 매핑하는 알고리즘을 개발할 수있는 시뮬레이터를 만들었습니다.
링컨 실험실은 매사추세츠 주 비벌리에있는 매사추세츠 태스크 포스 1 훈련 사이트에서 첫 번째 응답자와 새싹 테스트를 테스트했습니다.이 테스트를 통해 연구원들은 로봇의 내구성과 휴대 성을 향상시키고 로봇을보다 효율적으로 성장시키고 조종하는 방법을 배울 수있었습니다. 이 팀은 이번 봄에 더 큰 현장 연구를 계획하고 있습니다.
Hanson은“도시 수색 및 구역 팀과 첫 번째 응답자는 지역 사회에서 중요한 역할을 수행하지만 일반적으로 거의 연구 개발 예산을 가지고 있습니다. “이 프로그램을 통해 포도 나무 로봇의 기술 준비 수준을 응답자가 시스템의 실습 데모에 참여할 수있는 지점으로 밀어 넣을 수있었습니다.”
제한된 공간을 감지하는 것은 재난 응답 커뮤니티에 고유 한 문제가 아니라고 덧붙였다. 이 팀은 액세스하기 어려운 위치를 가진 군사 시스템 또는 중요한 인프라의 유지 관리에 사용되는 기술을 상상합니다. 초기 프로그램은 무효 공간을 매핑하는 데 중점을 두었지만 향후 작업은 위험을 현지화하고 잔해를 통한 운영의 생존력과 안전성을 평가하는 것을 목표로합니다.

Chad Council은 매사추세츠 태스크 포스 1 사이트에서 잔해를 통해 로봇을 항해합니다. | 출처 : MIT 연구원
게시물 MIT의 덩굴 로봇은 잔해를 짜서 긴급 대응자를 도울 수 있습니다. 먼저 나타났습니다 로봇 보고서.