
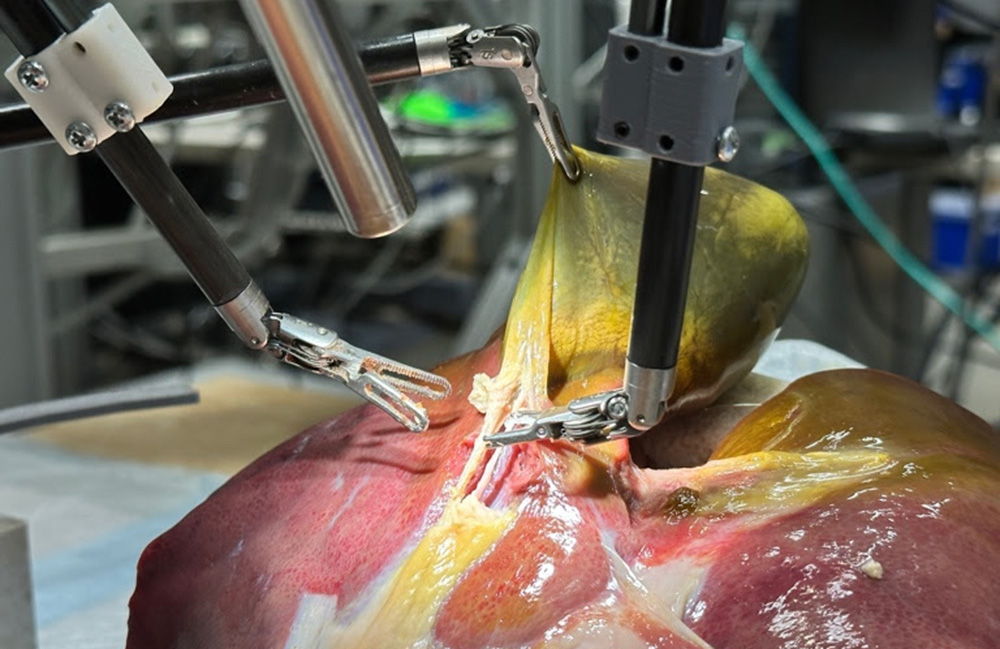
담낭 수술을 수행하는 수술 로봇 변압기 계수. | 출처 : Juo-Tung Chen, Johns Hopkins University
존스 홉킨스 대학교 (Johns Hopkins University)는 오늘 수술 비디오에 대해 훈련 된 로봇이 인간의 도움없이 담낭 제거의 긴 단계를 수행했다고 발표했다. 로봇은 생명과 같은 환자에게 처음으로 작동했습니다. 작업 중에는 멘토와 함께 일하는 초보자 외과 의사와 같이 팀의 음성 명령에 응답하고 배웠습니다.
연구원에 따르면 로봇은 실질 의료 응급 상황에서 전형적인 예상치 못한 시나리오에서도 시험 전반에 걸쳐 숙련 된 인간 외과 의사의 전문 지식으로 수행되었습니다. 연방 자금 조달 작업은 발전을 기록합니다 수술 Johns Hopkins는 로봇이 기계적 정밀도와 인간과 같은 적응성과 이해를 통해 공연 할 수있는 로봇 공학이라고 말했다.
“이 발전은 특정 외과 과제를 실행할 수있는 로봇에서 우리를 수술 절차를 진정으로 이해하는 로봇으로 이동합니다. Axel Krieger. “이것은 실제 환자 치료의 지저하고 예측할 수없는 현실에서 작동 할 수있는 임상 적으로 실행 가능한 자율 수술 시스템에 크게 더 가깝게 만드는 비판적 차이입니다.”
Johns Hopkins 시스템은 해부에 실시간으로 적응합니다
2022 년 Krieger의 스마트 조직 자율 로봇, 별살아있는 동물에 대한 최초의 자율 로봇 수술 – 돼지의 복강경 수술. 그러나 그 로봇은 특별히 표시된 조직이 필요하고, 고도로 통제 된 환경에서 작동했으며, 엄격하고 미리 정해진 수술 계획을 따랐습니다. 크리거는 조심스럽게 매핑 된 경로를 따라 운전하도록 로봇을 가르치는 것과 같다고 말했다.
그러나 그는 새로운 시스템은“어떤 조건에서도 모든 도로를 탐색하기 위해 로봇을 가르치는 것과 같다”고 말했다.
SRT-H (Surgical Robot Transformer-Hierarchy)는 실제로 수술을 수행한다고 그는 말했다. 개별 해부학 적 특징에 실시간으로 적응하고, 즉시 결정을 내리고 예상대로 진행되지 않을 때 자체 조정할 수 있습니다.
SRT-H는 Chatgpt를 강화하는 것과 동일한 기계 학습 아키텍처로 구축 된 대화식으로 구어체 명령 (예 :“담낭 머리를 잡기”)과 수정 (“왼쪽 팔을 왼쪽으로 조금 움직입니다”)에 응답 할 수 있습니다. 로봇은이 피드백에서 배웁니다.
“이 작품은 자율적 배치에 대한 기본 장벽 중 일부를 다루기 때문에 사전 노력의 주요 도약을 나타냅니다. 수술 현재 스탠포드 대학교에있는 존스 홉킨스 (Johns Hopkins)의 전 박사후 연구원 인 Ji Woong“Brian”Kim의 수석 작가는 말했다.“우리의 연구는 AI 모델이 외과 적자 자율성을 위해 충분히 안정적으로 만들 수 있음을 보여줍니다.
 초기 새 할인으로 지금 저장하십시오
초기 새 할인으로 지금 저장하십시오{kind=link}
SRT-H는 기본 수술 작업을 기반으로합니다
작년에 Krieger의 팀 사용된 바늘 조작, 신체 조직을 들어 올리는 3 가지 기본 수술 작업을 수행하기 위해 로봇을 훈련시키는 시스템. 그 작업은 각각 몇 초 밖에 걸리지 않았습니다. Johns Hopkins는 a 2025 RBR50 Robotics Innovation Award 업적을 위해.
Gallbladder-removal 절차는 훨씬 더 복잡하고 17 개의 작업이 있습니다. 로봇은 특정 덕트와 동맥을 식별하고 정확하게 잡고 전략적으로 클립을 배치하고 가위로 심하게 부품을 뿌려야했습니다.
SRT-H는 비디오를 보면서 담낭 작업을하는 방법을 배웠습니다. 대학교 돼지 시체에서 그것을하는 외과의. 팀은 작업을 설명하는 캡션으로 시각적 훈련을 강화했습니다.
Johns Hopkins에 따르면 비디오를 본 후 로봇은 100% 정확도로 수술을 수행했습니다. 로봇은 인간 외과 의사보다 작업을 수행하는 데 시간이 오래 걸렸지 만 결과는 전문가 외과 의사의 결과와 비교할 수있었습니다.
공동 저자이자 Johns Hopkins Surgeon 인 Jeff Jopling은“수술 거주자가 종종 운영의 다른 부분을 다른 속도로 마스터하는 것처럼,이 연구는 자율 로봇 시스템을 유사하게 모듈화적이고 진보적 인 방식으로 개발하겠다는 약속을 보여줍니다.
이 로봇은 균일하지 않은 해부학 적 조건에서 예상치 못한 우회에서 수행되었습니다. 연구자들이 시스템의 시작 위치를 변경했을 때와 혈액 모양의 염료를 추가하여 담낭과 주변 조직의 외관을 변화시킬 때를 포함하여.
Krieger는“나에게는 복잡한 수술 절차를 자율적으로 수행 할 수 있음을 실제로 보여줍니다. “이것은 가능하다는 개념 증명이며,이 모방 학습 프레임 워크는 이러한 복잡한 절차를 높은 수준의 견고성으로 자동화 할 수 있습니다.”
이 팀은 더 많은 유형의 수술에 대해 시스템을 훈련하고 테스트하고 완전한 자율 수술을 수행 할 수있는 능력을 확장하고 싶다고 말했다.
게시물 Johns Hopkins는 로봇에게 현실적인 환자에 대한 담낭 제거를 수행하도록 가르칩니다. 먼저 나타났습니다 로봇 보고서.