


Programming Industrial Robots는 종종 가르치는 펜던트, 오프라인 도구 및 시행 착오에 의존하는 노동 집약적 프로세스입니다. 공유 공간에서 여러 로봇을 조정하면 더 복잡성이 추가되어 충돌과 비 효율성이 있습니다. 전 세계적으로 430 만 개가 넘는 산업용 로봇이 사용되면서 프로그래밍에 필요한 시간은 자동화 스케일링의 주요 장벽으로 남아 있습니다.
최근에 발표 된 연구 과학 로봇 공학 새로운 방향을 제안합니다. 종이,“Roboballet : 그래프 신경망 및 강화 학습으로 다중 로봇 도달 계획,”Google Deepmind Robotics, Intrinsic 및 University College London의 세부 사항. 팀은 강화 학습 및 그래프 신경망 (GNN)을 사용하여 공유 작업 공간에서 여러 로봇에 대한 충돌없는 모션 계획을 생성하는 AI 모델을 개발했습니다.
연구자들이 다루는 문제는 새로운 것이 아닙니다. 클래식 모션 계획 알고리즘은 개별 로봇에 대한 신뢰할 수있는 경로를 생성 할 수 있습니다. 그러나 이러한 방법을 꽉 조이는 여러 로봇으로 확장하는 것은 계산적으로 어려워집니다. 엔지니어는 종종 갈등을 피하기 위해 알고리즘을 매개 변수화하거나 수동으로 궤적을 조정하는 데 중요한 시간을 소비합니다. 새로운 AI 접근법은 그 프로세스의 대부분을 자동화하는 것을 목표로합니다.
내재는 산업용 로봇 공간에서 비교적 새로운 플레이어입니다. 이 회사는 2021 년에 산업용 로봇을보다 쉽게 사용하고 프로그램 및 규모로 만들기 위해 알파벳의 X“Moonshot Factory”에서 분사했습니다. 그 이후로 내부 R & D와 인수를 통해 확장되었습니다. 2022 년에 내재는 오픈 소스 로봇 공학 재단을 인수했습니다로봇 운영 체제 (ROS) 뒤의 조직. 그 움직임은 ROS 전문 지식을 Intrinsic의보다 지능적인 자동화 도구 개발에 통합하면서 더 넓은 로봇 공동체 커뮤니티를 지원하겠다는 약속을 시사했습니다.

이 방법의 핵심에는 수백만 개의 합성 생성 시나리오에 대한 강화 학습을 통해 교육을받은 GNN이 있습니다. 이 프레임 워크에서 로봇, 작업 및 장애물은 그래프의 노드로 표시되는 반면 가장자리는 관계를 정의합니다. 연구원들은이 모델이 시행 착오로 궤적을 계획하는 법을 배우고 결국 보이지 않는 새로운 레이아웃에 적용될 수있는 일반화 된 전략을 개발한다고 말했다. 내재적 인 고유 한 일단, 시스템은 수동 코딩없이 모션 계획을 생성하거나 펜던트를 가르치거나 미세 조정을하는 CAD 파일과 높은 수준의 작업 설명 만 필요하다고 말했다.
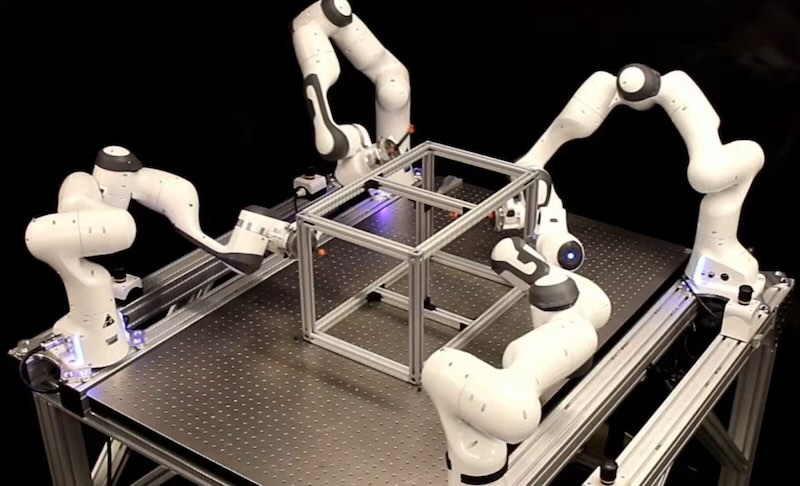
실험실 평가에서 모델은 최대 8 개의 로봇에 대한 모션 계획을 생성하여 종종 몇 초 안에 거의 최적화 된 솔루션을 생성합니다. 내재적에 따르면, AI 기반 접근법은 전통적인 방법과 비교할 때 궤적 품질이 약 25%의 개선을 보였고, 또한 강한 확장 성을 보여 주었다. 예를 들어, 4에서 8 로봇으로 이동할 때 작업 실행 시간은 평균 60%감소했습니다. Intrinsic은 이것이 효율성이 저하되지 않고 시스템 복잡성으로 증가 할 수 있음을 시사합니다.


자세한 단계별 지침없이 “작업 묶음”을 처리하는 기능은 시스템에 주목할 만합니다. 일련의 목표가 주어지면 개발자들은 모델이 일련의 행동 순서와 해당 충돌이없는 궤적을 자동으로 결정한다고 말했다. Google DeepMind 및 Intrinsic에 따르면 워크 셀에서 엔터티 간의 관계를 인코딩하는 방식으로 인해 재교육이나 인간의 개입없이 새로운 시나리오에 적응할 수 있습니다.
Roboballet 팀은 AI 중심 계획이 프로그래밍 시간을 줄이고 유연성을 향상 시키며 변화하는 제품 설계 또는 예기치 않은 혼란에 더 빠르게 적응할 수 있다고 말했다. 앞으로이 접근법을 AI-ENABLED 인식과 결합하면 동적 변화에 대한 응답으로 로봇이 즉석에서 회신 할 수있어 다운 타임이 더욱 줄어 듭니다.
게시물 Google Deepmind, 다중 로봇 계획을위한 Intrinsic Build AI 먼저 나타났습니다 로봇 보고서.