

Opteran은 2020년 Airbus Defense and Space가 설립된 이후부터 협력해 왔습니다. 이제 회사는 Airbus의 로버에 자율 시스템을 구현하게 됩니다. | 출처 : Opteran
Opteran의 범용 뉴로모픽 소프트웨어는 앞으로 몇 년 안에 화성으로 향할 수 있습니다. 회사 오늘 Airbus Defense and Space는 유럽 우주국과 영국 우주국의 지원을 받아 Airbus 우주 탐사선에서 Opteran Mind를 테스트할 것이라고 발표했습니다.
런던에 본사를 둔 Opteran은 자연이 우주 로봇의 자율성에 대한 보다 효율적이고 강력한 접근 방식을 제공한다고 말했습니다. 그만큼 회사 말했다 제품 미래의 화성 임무 및 기타 임무를 위한 새로운 임무 기능을 가능하게 할 것입니다. 공간 탐사 프로젝트.
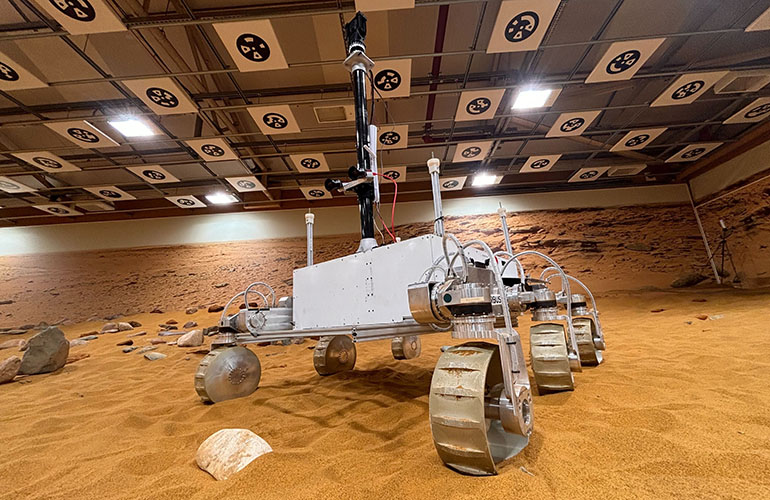
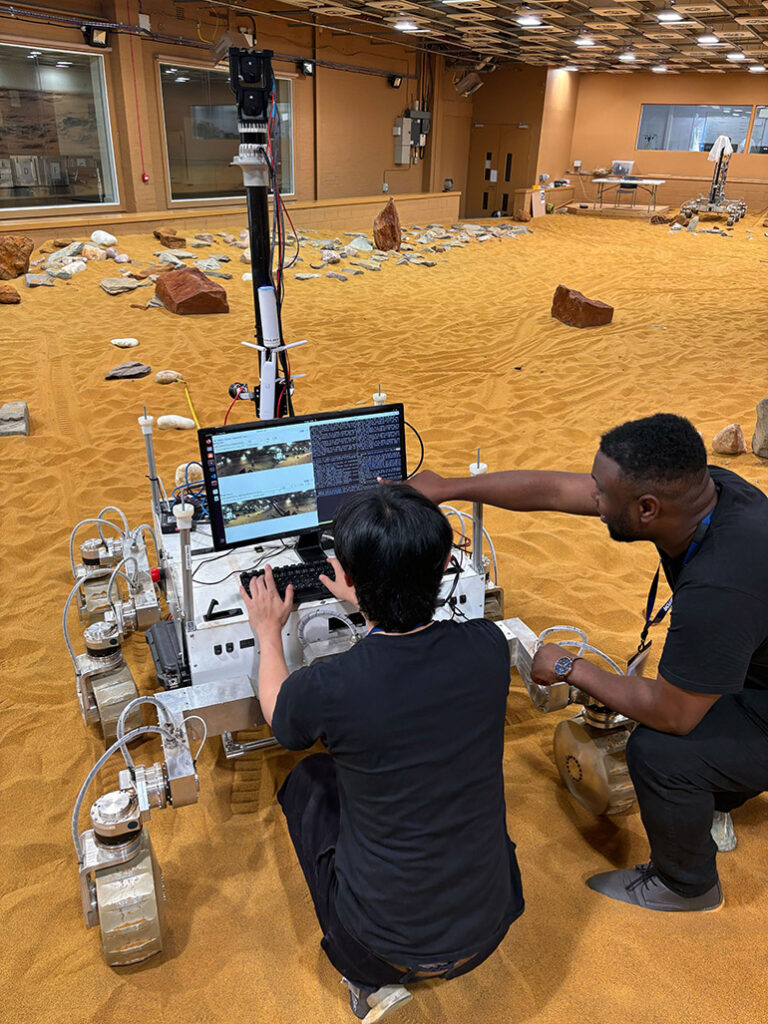
Opteran은 동물과 곤충의 시력, 항법 및 의사 결정에 대한 10년 이상의 연구를 바탕으로 Airbus의 Mars Yard에서 가장 험난한 외부 환경에서 탐사선에 깊이 인식을 제공하는 테스트를 수행하고 있습니다.
Opteran의 공동 창립자이자 CEO인 David Rajan은 “화성은 자율성을 구현하기 가장 어려운 곳 중 하나일 것입니다.”라고 말했습니다. 로봇 보고서. “일반적으로 자율성을 구현하는 것은 이 행성에서 일반적이지만 화성에서 메시지를 받는 데 30분 정도 걸리는 행성에서 자율성을 구현하려고 합니다.”
“그것은 아주 아주 가까이 있는 달과는 다르다”고 그는 덧붙였다. “사람들은 달에 비해 화성이 얼마나 멀리 떨어져 있는지 깨닫지 못하는 것 같아요. 그래서 이 지역에서 아주 멀리 떨어져 있고 적대적인 곳에서 자율적인 기계를 만들려는 회사와 함께 일하는 것은 순간적으로 흥미로웠습니다.”
Opteran은 광범위한 데이터나 교육 없이도 자율 기계가 까다로운 환경을 효율적으로 이동할 수 있도록 자연 두뇌 알고리즘을 소프트웨어로 역설계했다고 말했습니다. 2020년에 설립된 이 회사는 회사 을 획득 2024 RBR50 로봇공학 혁신상 이 작업을 위해.
우주 로봇 공학에서는 견고성이 가장 중요합니다.
“의 일부 [challenge] 화성에 보낼 시스템을 구축하는 데 드는 비용과 복잡성입니다. 거기까지 가는 것만으로도 비용이 너무 많이 듭니다.”라고 Rajan은 말했습니다. “그래서 고장나면 다른 것을 보낼 수는 없습니다. 문제를 해결하기 위해 다른 사람을 거기로 보낼 수는 없습니다. 따라서 시스템은 강력해야 합니다.”
오늘날의 세계 외 로봇 중 상당수는 번거롭습니다. 움직일 때마다 여러 대의 카메라로 주변 지도를 계산하는 데 몇 분이 걸립니다.
“오늘날 파노라마 깊이 지도를 구축할 때 센서의 데이터를 처리하고 수행할 작업을 결정하는 데 몇 분 정도 걸릴 수 있습니다.”라고 Rajan은 설명했습니다. “그래서 기계인 로버는 본질적으로 데이터 처리를 위해 멈추고 몇 분 정도 소요됩니다. 그런 다음 무엇을 해야 할지 파악한 다음 다시 이동할 수 있습니다.”
이 탐사선은 지역에 따라 몇 피트 또는 심지어 인치마다 이 과정을 반복해야 한다고 Rajan은 말했습니다. 이는 로버가 지구를 횡단하는 아기의 발걸음을 천천히 걷는다는 것을 의미합니다.
Opteran은 자사의 시각 및 인식 시스템이 로봇의 중요한 전력 소비를 추가하지 않고도 화성 탐사선이 까다로운 조건에서 주변 환경을 밀리초 단위로 이해할 수 있는 능력을 제공한다고 주장했습니다.
Rajan은 “로켓을 발사하려면 기계의 무게가 정말 중요합니다.”라고 말했습니다. “그리고 원격으로 배터리를 사용하여 작동하려면 태양광 충전이 필요하며 전력 소비가 정말 중요합니다.”
“그래서 저전력, 저중량 알고리즘이고, 초당 90프레임으로 깊이 맵을 처리하고 구축할 수 있는 알고리즘입니다. 그래서 그것은 일종의 즉각적인 것입니다.”라고 Rajan은 계속 말했습니다. “이로 인해 속도와 수행할 수 있는 작업이 완전히 달라졌습니다. 본질적으로 우리는 처리하는 데 몇 분도 걸리지 않습니다.”

Opteran은 화성 탐사를 위한 향후 계획을 논의합니다.
Opteran은 Opteran Mind 기술을 실제 우주 탐사에 성공적으로 적용하면 극한의 외부 지형에서 탐색 기능이 크게 확장될 것이라고 말했습니다. 궁극적으로 이는 로버에게 지속적인 탐색을 제공하는 동시에 더 멀리, 더 빠르게 운전할 수 있게 해줍니다.
이 프로젝트의 단기 초점은 장애물 감지를 위한 깊이 추정에 있고 중기 초점은 인프라가 없는 시각적 탐색에 있습니다.
“우리가 고객과 함께 현장에서 하는 일은 자율주행 기계가 인프라 없이 독립적으로 움직일 수 있도록 하는 것입니다. 이는 깊이를 판단할 수 있을 뿐만 아니라 위치를 파악하고 지도를 작성하고 탐색할 수 있다는 것을 의미합니다.”라고 Rajan은 말했습니다.

Opteran은 화성 탐사선의 자율성을 향상시키기 위해 ESA 및 Airbus와 협력하고 있습니다. 출처 : Opteran
“이것은 이 프로젝트의 일부가 아닙니다. 그 점은 분명히 해야 하지만 우리의 열망은 깊이 인식을 넘어 위치 파악과 매핑을 살펴보는 것입니다.”라고 그는 계속했습니다.
Rajan은 Opteran이 언젠가 화성에 함대로 보낼 수 있는 더 작고, 가볍고, 저렴한 탐사선을 사용하는 데 관심이 있다고 말했습니다. 이러한 일회용 로봇은 어려운 지형의 매핑을 처리할 수 있습니다.
초기 테스트 결과가 해당 기관에 제출되면 유럽 우주국 (ESA) 목표는 보조금 지원의 다음 단계로 이동하여 배포 및 상업화에 초점을 맞추는 것입니다.
Rajan은 “이것은 팀 노력이며 모든 작은 측면을 고려해야 하며 최선을 다해야 합니다”라고 말했습니다. “지구뿐만 아니라 태양계에서도 가장 가혹한 조건에 직면하게 될 것이기 때문에 망각에 최적화되어야 합니다.”
이 프로젝트는 ESA의 일반 지원 기술 프로그램(General Support Technology Program)의 자금 지원을 받습니다(GSTP) 아직 우주로 보낼 준비가 되지 않은 첨단 기술을 가져와 향후 임무에 사용할 수 있도록 개발하는 영국 우주국을 통해 이루어집니다.
게시물 ESA는 미래 우주 임무를 위해 Opteran의 곤충에서 영감을 얻은 자율성을 테스트합니다. 처음 등장한 로봇 보고서.