
Collaborative Robotics Inc.는 오늘 처음으로 Proxie 모바일 조작기를 공개했습니다. 이 스타트업은 브래드 포터(Brad Porter)가 2022년 회사를 설립한 이후 로봇 설계에 대해 비밀을 유지해왔다.
Porter는 창고 내 애플리케이션을 위한 모바일 조작기의 중요성을 언급함으로써 로봇 설계를 암시했습니다. 휴머노이드보다 창고 작업 흐름에 더 적합한 운동학.
포터는 로봇 공학 경험과 비전을 가져옵니다
포터는 자주 기여해 왔습니다. 로봇 보고서 그리고 손님이 오셨어요 로봇 보고서 팟캐스트. 그는 최근에 자신의 생각을 공유했습니다. Amazon, Covariant 리더십 인수.
~에 아마존Porter는 로봇 공학 부사장 및 저명한 엔지니어로서 500,000개 이상의 로봇 배치를 주도했습니다. Amazon 이후 Porter는 더 나은 데이터와 도구를 통해 유비쿼터스 자율성을 가속화할 수 있는 기회를 보고 합류하게 되었습니다. AI 저울 최고 기술 책임자로서.

{kind=link}
프록시는 이미 시험 중입니다.
2024년 4월 협동로봇공학 1억 달러 규모의 시리즈 B 라운드를 마감했습니다. 자율이동로봇 상용화를 향해AMR). 캘리포니아주 산타클라라에 본사를 둔 회사 Proxie는 다양한 제조, 공급망 및 의료 업무 흐름에서 사람들과 함께 안전하고 저렴하게 일할 수 있다고 말했습니다.
많은 경우에 이것은 동일한 작업입니다. 휴머노이드 위해 경쟁하고 있습니다. 2024년 6월, 협동로봇 시애틀에 사무실을 열었습니다 AI 팀에 추가하기 시작했습니다.
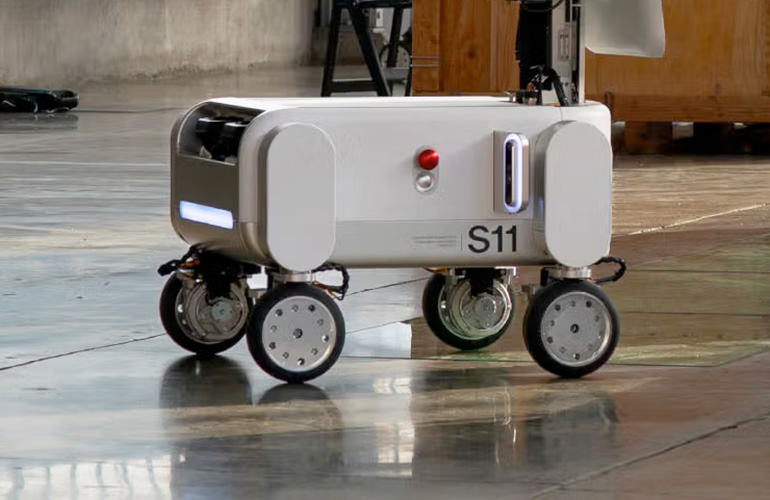
Proxie의 베이스에는 홀로노믹 모션을 제공하는 4개의 “스워브 드라이브” 모터가 포함되어 있습니다. | 크레딧: 협동로봇공학
포터가 말했다 로봇 보고서 Proxie는 이미 글로벌 고객을 포함한 여러 파일럿 고객을 대상으로 시험 중입니다. 기호 논리학 회사. 주요 고객으로는 Moderna, Mayo Clinic, Owens & Minor 및 Tampa General Hospital이 있습니다. 그는 프록시가 대략 인간의 키를 가지고 있다고 말했습니다.
우리는 다른 AMR 기본 설계와 비교하여 방향 전환 드라이브를 사용하는 설계 의도에 대해 Porter에게 물었습니다. Proxie에는 “스워브 드라이브” 구성의 4개의 구동 휠이 있는 베이스가 있습니다. AMR은 카트에 부착된 후 카트를 다음 목적지로 끌어당겨 시설을 안전하게 탐색합니다.
“스워브 드라이브는 의사 홀로노믹 모션을 제공하여 선반 유닛 세트로 옆으로 미끄러질 수 있게 해줍니다. 방향 전환 드라이브를 사용하면 이동을 시작하기 전에 캐스터를 스냅할 수도 있습니다. 차동 구동 베이스를 사용하면 AMR에는 자유도가 없으므로 더 서투릅니다. 마지막으로, 메카넘 휠에는 생산 시 관리하기 어려운 다른 문제가 있습니다.”
베이스 상단에는 카트 이동 구현을 위한 그리퍼와 인터페이스하는 이중 암 카트를 운반하는 수직 선형 축이 있습니다. 6자유도 협동 로봇 팔은 향후 Proxie의 옵션 구성이 될 것입니다.
Porter는 회사의 연구실에 다음과 같은 기능을 갖춘 이중 팔 조작기가 있다고 말했습니다. 알로하 그리퍼조작 작업의 경우.

Proxie에는 일반 핸들의 카트에 부착된 롤링 카트 그리퍼가 장착되어 시설 전체에서 카트를 안내할 수 있습니다. | 크레딧: 협동로봇공학
모바일 조작이 탄력을 받고 있습니까?
모바일 산업용 로봇(MiR)도 오늘 모바일 매니퓰레이터를 공개했습니다. MC600. 모바일 매니퓰레이터는 MiR600 AMR을 Universal Robots A/S의 UR20 및 UR30 협동 로봇 암과 결합합니다. 두 회사 모두 Teradyne의 소유입니다. MC600은 최대 600kg(1,322lb.)의 페이로드를 처리하고 산업 환경에서 복잡한 작업 흐름을 자동화할 수 있습니다.
“나는 모바일 매니퓰레이터가 휴머노이드보다 더 나은 솔루션이라고 믿습니다. 이는 Amazon과 같은 환경에 휴머노이드를 배치하는 방법을 살펴보고 많은 프로세스 경로를 살펴본 다음 어떤 유형의 작업이 수행되고 있는지 살펴본 다음 휴머노이드 로봇을 배치하려는 복잡성을 살펴본 데서 비롯됩니다. 거기. 비용, 복잡성, 안전성, 배터리 수명, 필요한 AI 등을 포함하면 우리는 로봇이 충분히 강력하지 않을 것이라는 우려를 갖게 되었습니다. 우리는 휴머노이드가 멋있어 보이지만 별로 강하지 않다는 사실에 대해 충분히 이야기하지 않습니다. 그들은 Proxie처럼 1,500파운드짜리 카트를 움직일 수 없을 것입니다.”
Kassow Robots는 모바일 조작을 목표로 하고 있습니다. 새로운 Edge Edition 코봇 암을 사용합니다. 새로운 코봇은 배터리 전원으로 직접 DC 연결이 가능하므로 모바일 로봇에 장착된 상태에서도 작동할 수 있습니다. 원격 전원 켜기/끄기 제어 기능을 제공하므로 모바일 로봇 컨트롤러 또는 PLC에서 제어할 수 있습니다.
ASTM은 모바일 매니퓰레이터 표준을 제안합니다.
ASTM 인터내셔널의 F45 로봇 공학 위원회는 모바일 조작기가 구조화되지 않은 환경에서 교란을 얼마나 잘 처리하는지 측정하기 위한 새로운 표준 관행(WK92144)을 제안합니다. 이 표준에는 샘플 테스트 장치를 사용하여 이러한 자동화된 팔이 중단에 어떻게 반응하는지 문서화하기 위한 지침이 포함되어 있습니다. ASTM의 Omar Aboul-Enein에 따르면 중장비와 같은 요인은 특히 복잡한 부품을 다루는 항공우주 및 에너지와 같은 중요한 부문에서 이러한 로봇에 부정적인 영향을 미칠 수 있습니다.
이 표준은 신뢰성을 측정하고 모바일 조작기 성능을 향상시키는 방법을 제공함으로써 제조업체, 통합업체 및 최종 사용자에게 도움이 될 것입니다. ASTM 표준 개발에 참여하는 데 관심이 있다면 다음 사이트에서 참여할 수 있습니다. www.astm.org/JOIN.
게시물 Collaborative Robotics, Proxie 모바일 매니퓰레이터 공개 처음 등장한 로봇 보고서.