
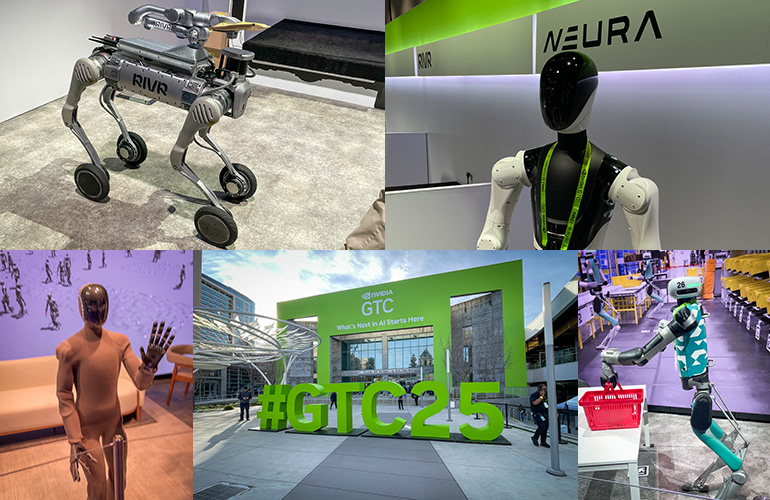
NVIDIA GTC 2025에는 NVIDIA 제품을 로봇에 포함시키는 많은 주요 개발자들이 소개되었습니다. | 크레딧 : 로봇 보고서
나는 NVIDIA GTC에서 3 일차를 엑스포 바닥을 탐색하여 최신 NVIDIA 제품에 대해 배우고 로봇 공학 및 인공 지능 산업의 주요 플레이어를 따라 잡았습니다.
올해 인간화 로봇 공급 업체가 더 적었습니다. 민첩성 로봇 공학, 1X 기술, Unitree RoboticsNeura Robotics는 엑스포 플로어에 시스템을 가지고 있었고 Engineai는 작은 키오스크를 가지고 표시 할 비디오 만 가지고있었습니다.
다른 몇 가지가있었습니다 공동 작업 로봇 몇 가지와 함께 시연 모바일 로봇. 전반적으로 Nvidia GTC에 로봇이 적은 것 같습니다. 보여주다 올해 바닥.
나는 또한 다음과 같은 여러 회사와 이야기했습니다 Lab0 그리고 Agilox그것은 이번 주에 직원들을 분리하여 더 큰 데모를 약속 시카고에서. Unitree 가져올 것입니다 그것의 g1 인간형 로봇 공학 서밋 & 엑스포 다음 달.

{kind=link}
1X는 인간의 손길로 인간형을 설계합니다
나의 첫번째 중지였다 1x 기술. 나는 만났다 Bernt Børnich CEO 처음으로 직접 그리고 마침내 회사의 로봇이 실제로 실시간으로 보았습니다. 나의 초기 인상? 그만큼 휴머노이드 인상적이었고, 특히 그 명백한 민첩성이었다.
내 관심을 끌었던 것은 텔레오퍼 부스의 데모 (아래 비디오 참조). 로봇은 원격으로 제어되었지만 운영자가 자신의 의도를 로봇으로 얼마나 쉽게 번역 할 수 있는지 분명했습니다. 부드럽게 픽업하고 진공 청소기를 사용하여 카펫을 청소하는 것은 직관적 인 컨트롤에 대한 증거였습니다. 1X는 원격을 통해 자율성을 위해 로봇을 적극적으로 훈련시키고 있습니다.
Børnich에게 회사 제품 로드맵의 현재 상태에 대해 물었습니다. 그는 더 많은 베타 장치를 집 올해 말. 자율성은 여전히 제한적이며 로봇은 네트워크를 통해 적극적으로 텔레오퍼를 사용하지만 AI 모델을 교육하는 데 필요한 정보로 “데이터 플라이휠”을 채우려는 1X 계획입니다.
안전 특히 로봇을 집으로 보낼 계획이기 때문에 1x에 가장 중요합니다. 이 초점은 로봇의 디자인에서 분명합니다. 단단한 껍질 대신 부드러운 재료로 옷을 입고 덜 위협적인 모습을 제공합니다.
인간 근육이있는 곳에 전략적으로 배치 된 패딩은 우발적 인 접촉의 경우 영향을 최소화하도록 설계된 사려 깊은 세부 사항입니다. 이 디자인 언어는 그것을 잠재적 인 가정 동반자로 자리 매김합니다.
민첩성의 숫자는 전신 RL 신체 제어를 보여줍니다
에서 민첩성 로봇 공학 부스 옆집, 나는 공동 창립자이자 최고 로봇 장교 인 조나단 허스트 (Jonathan Hurst)와 최고 기술 책임자 인 프라스 벨라 파 푸디 (Pras Velagapudi)와 이야기했다. 그들은 전신 제어를위한 AI 구동, 강화 학습 (RL)의 적용을 보여 주었다.
Digit Humanoid Demo는 이전에 회사에서 본 것과는 다릅니다. Promat 및 기타 이벤트는 업계 세로에 중점을두고 있지만 Nvidia GTC는 수평 기술 쇼케이스이므로 Agility Robotics는 AI 개발 프로그램에서 새로운 발전을 선보였습니다.
이 회사는 전신의 로컬 조작 정책이 처음부터 개발되었다고 밝혔다. 아래 비디오에서 볼 수 있듯이 로봇의 보행은 다소 불규칙하고 거의“취한”것으로 보입니다.
그러나 허스트가 설명 했듯이이 새로운 걸음 걸이는 배운 행동이었고 엔지니어링 팀은 결과가 무엇인지 알지 못했습니다. 로봇은 2 주 만에 자율적으로 걷는 법을 배웠으며, 대부분은 Nvidia 팀과의 시뮬레이션에서 발생했습니다.
민첩성은 인 Humanoids의 산업 배치의 리더가되지만 연구 회사이며 항상 가능한 것의 경계를 추진합니다.
RIVR은 막판 배송을위한 다리 로봇을 보여줍니다
나는 또한에 의해 들렀다 리브르 부스는 마지막 마일 배달을 위해 설계된 바퀴 달린 4 중 로봇을 보았습니다. 이 로봇은보다 훨씬 크고 강력합니다 보스턴 역학‘지점, 그리고 그것은 놀라운 민첩성을 나타냈다.
보는 것은 흥미로웠다 다리 로봇 마지막 마일과 같은 실제 응용 프로그램을 위해 개발 중입니다 배달.
Neura Robotics는 휴머노이드를 괴롭 힙니다
신경 로봇 공학 4NE-1 휴머노이드 로봇을 보여주었습니다. 그러나 로봇은 정적 디스플레이였습니다. 회사는 올해 말에 그것을 롤아웃 할 계획이거나“걸어 나가야한다”고 말해야 할 계획이므로, 우리는 그것을 실제로보기 위해 기다려야합니다.

Neura는 이중 로봇을 만들고 있습니다. NVIDIA GTC 2025에서 회사는 정적 디스플레이를 가지고있었습니다. | 크레딧 : 로봇 보고서
Teradyne은 AI 로드맵에 대한 큰 계획을 가지고 있습니다
에서 Teradyne 부스, 나는 AI 책임자 인 제임스 데이비슨을 만났다. 그는 Teradyne에서 감독하고있는 글로벌 이니셔티브를 모두 유니버설 로봇을 가로 질러 강조했습니다.ur) 및 모바일 산업 로봇 (미) 제품 팀은 파트너를위한 빠른 반복과 쉽게 통합 할 수있는 강력한 AI 플랫폼을 구축합니다.
Davidson은 Android Studio와 유사한 플랫폼을 만드는 것을 구상했으며 파트너가 원활한 인터페이스와 지원 라이브러리를 통해 시스템을 개발할 수 있도록 빠르고 쉽게 만들기위한 것입니다. 목표는 파트너가 특정 요구를 쉽게 선택하고 사용자 정의 할 수있는 조작 및 인식과 같은 핵심 AI 기능을 제공하는 것입니다.
Teradyne의 전략은 일대일에 맞는 로봇 솔루션을 만들기보다는 빠른 개발과 적응을 허용하는 유연한 생태계를 구축하는 것으로 보입니다. Teradyne은 플랫폼 개발 및 전략적 파트너십에 중점을 두어 다양한 산업에서 AI 중심의 로봇 공학 채택을 가속화하는 것을 목표로합니다. 우리는 미래에 Davidson의 직접 더 많은 것을들을 것으로 기대할 수 있습니다.

Mike Oitzman (L) Nvidia GTC 2025의 Teradyne 부스에서 Teradyne의 AI 장교 제임스 데이비슨 (R)과 인터뷰. | 크레딧 : McCall 미디어
코봇은 프록시 로봇을 가져옵니다
또한 GTC에서는 공동 로봇 공학 프록시 가까이서 개인 로봇.
동안 모바일 조작기 쇼에서 달리지 않았기 때문에 디자인과 건축을 조사 할 수있었습니다. 이 시스템에는베이스의 4 개의 휠을위한 “Swerve”드라이브와 강력한 카트 포획 장치가 있습니다.

저자는 Collaborative Robotics의 Proxie AMR 옆에 서 있습니다. | 크레딧 : 로봇 보고서
나는 잠시 로봇 외과 의사가되었습니다
쇼에서 재미있는 대화식 데모 중 하나는 직관적 인 외과 참석자들이 회사의 Da Vinci 로봇을 앉아서 텔레비전 할 수있는 부스. 나는 얼마나 쉬운 지에 놀랐다. 수술 시스템은.
3D 모니터 및 수동 캘리퍼를 조정 한 후 학습 곡선은 즉각적이었습니다. 툴팁이 우주에있는 곳에 대한 완벽한 3D 이해력으로 테이블 위에 아이템을 픽업하고 옮길 수있었습니다.
이것은 고도로 세련된 시스템이지만, 이것을 빨리 배울 수 있다면,이 도구가 숙련 된 외과 의사의 기능을 어떻게 향상 시킬지 상상할 수 있습니다.
Pebble Mobility는 최신 Smart RV입니다
나는 Pebble Mobility의 CTO 인 Stefan Solyom에서 새로운 Pebble Flow 레크리에이션 차량을 완전히 둘러 보았습니다. RV의 기능에 대해 알게 된 후에는 로봇으로 분류 할 것입니다. 차량에는 45kWh 배터리, 전원 휠이있는 쉬운 견인 및 1.1kW 태양열 어레이가 있습니다.
Pebble Flow를 로봇으로 정의하게 한 기능 중 하나는 The Magic Hitch 기능입니다. 트레일러는 견인 차량 후면으로 자율적으로 운전하고 비전 카메라를 사용하여 자동으로 차량에 연결할 수 있습니다.
일단 차량에는 배터리의 전원을 사용하여 바퀴를 구동하고 견인 차량의 드래그를 줄이는 하나의 모드를 포함하여 여러 모드가 있습니다. 이것은 조약돌 흐름이 전기 자동차의 범위에 최소한의 영향을 미치는 전기 자동차 뒤에 견인 될 수 있음을 의미합니다.
트레일러는 재생 제동을 사용하여 배터리를 재충전 할 수 있습니다. RV는 “충전 모드”에 넣을 수도 있고 캠프장에 도착하기 전에 배터리를 완전히 충전하기 위해 견인 차량의 전력에 부드러운 재생 제동을 가할 수 있습니다.
캠프장에서 일단 스마트 폰 앱에 대한 Bluetooth 연결을 사용하여 트레일러를 풀지 않고 최종 위치로 이동할 수 있습니다.

새로운 Pebble Flow Smart RV는 회사가 창립자 클럽 에디션을 최초의 유료 고객에게 배송 할 준비를하면서 생산에 참여하고 있습니다. | 크레딧 : 로봇 보고서
전반적으로 Pebble Flow는 작년에 출시 될 가장 혁신적인 RV 중 하나입니다. Pebble Flow의 목표 시장은 주로 전기 자동차 소유자이지만 가스/디젤 연료 전원 견인 차량 소유자는 플랫폼의 기능으로부터 혜택을받을 수 있습니다.
Pebble Flow는 NVIDIA GTC에 등장했습니다. 모든 시스템 관리 기능 및 인식에 대한 NVIDIA ORIN 프로세서가 있습니다. 조약돌 흐름은 미국에 지어졌으며 회사의 팀은 숙련 된 자동차 엔지니어와 실리콘 밸리 재향 군인으로 구성되어 있습니다.
이 회사는 올해 하반기에“설립자 에디션”을위한 선적 단위를 시작할 계획입니다. 설립자 에디션에는 모든 기능이 완전히 장착되어 있으며 미국 대륙 어디에서나 긴급 길가 지원이 포함되어 있습니다.

Pebble Flow는 Murphy Queen의 Queen 아래 책상을 포함하여 작업 구역을 특징으로합니다. | 크레딧 : 로봇 보고서
Nvidia GTC는 지속적인 발전을 보여줍니다
전반적으로 Nvidia GTC의 3 일차는 진화하는 로봇 공학 세계에 대한 광범위한 모습을 제공했습니다. 1X의 휴머노이드와 민첩성 로봇 공학의 AI 중심 학습 실험의 안전 의식 설계에서 Pebble의 자율 주행 RV에 이르기까지 로봇 공학의 미래는 흥미롭고 빠르게 다가오고 있음이 분명했습니다.
GTC의 모든 세션은 녹음되었으며 다음 주에 등록 된 이벤트 참석자들만 이용할 수 있습니다. 그런 다음 선택 세션이 게시되어 누구나 볼 수 있습니다. 가십시오 이벤트 사이트 더 배우려면.
게시물 AI 발전은 NVIDIA GTC에서 더 많은 민첩한 휴머노이드, 더 큰 자율성으로 이어집니다. 먼저 나타났습니다 로봇 보고서.