{kind=link}

Iko는 휴머노이드 로봇은 성능 요구 사항을 충족시키기 위해 올바른 모션 구성 요소가 필요하다고 말합니다. 출처 : Adobe Stock
휴머노이드 로봇은 관절, 부속기 및 엔드 이펙터를 명령하여 사실상 인간 기술을 제공하는 고급 신경망 덕분에 광범위한 활동을 변화시킬 것으로 예상됩니다. 그러나, 인간화의 채택은 고급 모션 구성 요소 없이는 작업과 환경에 맞게 설계되지 않으면 불가능할 것입니다.
성장하는 시장에는 의료, 소매 및 환대, 제조, 자재 취급 및 물류가 포함됩니다. 사실, 휴머노이드 시장 잠재력은 2035 년까지 최대 380 억 달러에이를 것으로 예상됩니다. ~에 따르면 Goldman Sachs 연구.
올바른 모션 구성 요소를 지정하고 로봇의 의도 된 작업 및 환경에 맞게 최적화하기 위해 정렬 해야하는 디자인 요소 중 일부를 살펴 보겠습니다.
휴머노이드 작업에는 정확하고 제어 된 움직임이 필요합니다
휴머노이드의 기계 시스템은 계획된 환경에서 작업을 수행하기 위해 최적화 된 구성 요소가 필요하지만 표준 제품이 운동을 위해 무엇을 할 수 있는지 알아내는 것이 중요합니다. 체계 사용자 정의 구성 요소에 커밋하기 전에.
여기에서 응용 프로그램 문제를 해결하기 위해 표준 제품을 수정 한 경험이 입증 된 경험이있는 모션 구성 요소 전문가에게 특별한 요구 사항을 전달할 수 있습니다. 다음은 IKO 제품을 예로 사용하여 작업에 적합한 표준 구성 요소와 함께 일반적인 휴머노이드 모션 요소입니다.
- 엉덩이, 조인트, 팔꿈치 또는 손목 움직임. 교차 롤러 베어링보다 휴머노이드에는 더 중요한 구성 요소가 없습니다 (CRBS). 롤러가 내부와 외부 고리 사이에서 서로 직각으로 교차하면 CRB는 방사형, 추력 및 모멘트 하중을 동시에 처리 할 수 있습니다. 이 배열을 통해 롤러는 경마장과 더 크게 접촉하여 팔꿈치, 엉덩이 및 기타 조인트의 로봇 액추에이터가 더 큰 안정성과 회전 정확도로 무거운 하중을 조작 할 수 있습니다. 당연히, 전형적인 휴머노이드는 14 ~ 20 개의 CRB를 가지고 있으며 다양한 기능을 수행합니다.
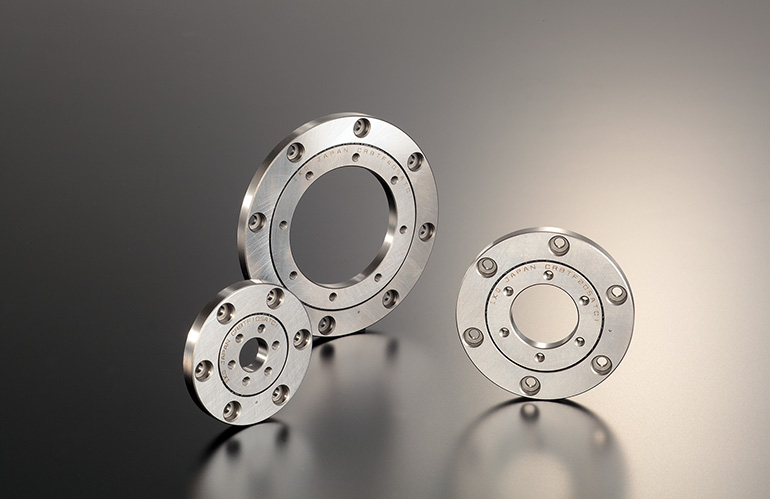
CRBT 및 CRBTF 교차 롤러 베어링의 높이는 5.5mm, 폭은 5mm입니다. 출처 : IKO
- 제어 된 선형 운동. 선형 모션 롤링 가이드 광범위한 크기로 제공되어 휴머노이드 몸의 다른 부분에 적합합니다. 예를 들어, 그리퍼 및 엔드 이펙터 그 모방 손가락은 종종 물체를 파악하는 데 사용되므로 정밀하게 열리고 닫아야합니다. 선형 모션 롤링 가이드는 로봇 손가락에게 오른쪽 클램핑 력을 제공하여 물체를 조작하는 동시에 물체를 손상시키지 않도록 충분히 민첩 할 수 있도록하여 작업을 선택하고 배치하는 데 중요합니다.
그러한 가이드 중 하나 인 Iko ‘s ML 시리즈LWL은 업계에서 가장 작은 크기 중 일부로 제공되며 폭은 1mm (0.03 인치)로 제공됩니다. 많은 베어링은 재순환 볼 형 디자인을 자랑하여 정확하고 제어 된 모션을 제공합니다.
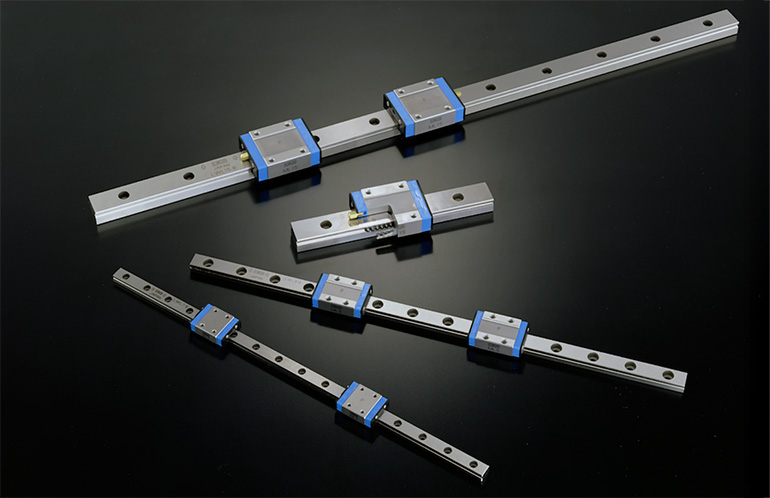
IKO는 ML 시리즈 선형 모션 롤링 가이드가 업계에서 가장 작은 크기 중 일부로 나옵니다. 소스 IKO
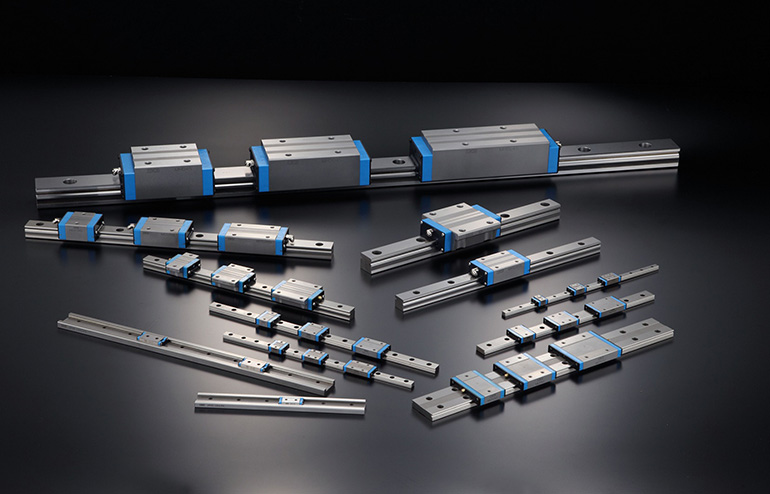
IKO 가이드는 로봇의 몸통, 팔 또는 다리로 설계하여 예를 들어 도달 범위를 확장하여 높은 선반에 접근 할 수있는 표준적이고 강성 긴 버전으로도 제공됩니다. 이 가이드는 로봇의 목에 사용하여 머리가 위나 장애물 주변의 피어를 주변의 주변을 더 잘 볼 수 있도록 할 수 있습니다.
- 구형 일반 베어링 – 부싱으로도 알려져 있습니다 – 인간 행동을 피벗하고 시뮬레이션 할 때 휴머노이드 사지를 안정화시킵니다. 예를 들어, 많은 휴머노이드에는 발 뒤쪽에베이스 플레이트에 연결되는 막대가 있습니다. 이러한 유형의 디자인의 구형 평범한 베어링을 사용하면 발과 발목이 돌, 회전하거나 앞뒤로 기울어 질 수 있습니다.
- 물체를 움켜 쥐고 돌립니다. 캠 팔로워 캠에 타기 위해 부품이 필요한 많은 내부 디자인에서 바람직하며, 더 많은 자유도를 제공하기 위해 원형 아크 위에 장착 할 수 있습니다.
IKO는 스터드 직경이 1.4mm (0/05 인치)의 작은 유닛을 포함하여 시장에서 가장 작은 CAM 팔로워 중 일부를 제공한다고 말했다. 이 구성 요소에는 제품에 대한 상당한 저하없이 추력 부하를 처리하는 내부 설계가 있습니다.

선형 가이드는 휴머노이드 로봇이 도달 범위를 확장하는 데 도움이 될 수 있습니다. 출처 : IKO
성능 개선에는 모션 트레이드 오프가 포함됩니다
휴머노이드 로봇은 사람과 동일한 환경을 차지하고 창고 토트와 같은 균일 한 크기의 물체를 조작하도록 설계되었으므로 표준 모션 구성 요소가 필요하다고 생각하기가 쉽습니다. 그러나 필요한 구성 요소 유형을 결정한 후에는 시스템 성능을 향상시키는 유일한 한계는 모션 목표를 최적화하는 능력입니다.
성능 향상과 관련하여, 휴머노이드 디자인에는 일반적으로 어려운 질문을하는 트레이드 오프가 있다는 것을 기억하는 것이 중요합니다. 신뢰할 수있는 모션 구성 요소 공급 업체가 귀하의 요구를 평가하고 옵션을 조언하며 답변을 제공하도록하십시오. 따라서 특히 휴머노이드 설계 목표가 다음과 같은 경우 구성 요소 제조업체와 긴밀히 협력하는 비용을 지불합니다.
- 모션 제어. 피벗, 회전, 회전 또는 진동 해야하는 모든 조인트에는 모션 구성 요소가 필요합니다. 그러나 인간의 움직임을 모방하려면 다양한 관절과 액추에이터가 효과적인 모션 제어를 사용해야합니다. 예를 들어, 모션 구성 요소 제조업체가 전통적인 로봇 조인트에서 높은 정밀하고 부드러운 회전을 달성하는 데 관련된 문제를 해결하는 데 도움이되는 방법은 다음과 같습니다.
두 개의 얇은 섹션 베어링이 작업을 수행 할 수 있지만 많은 양의 공간을 소비하고 비용이 많이 듭니다. IKO CRBS는 2 베어링 시스템을 제거 할 수 있습니다. 그들은 “x”패턴으로 배열 된 롤러를 통해 두 개의 베어링을 하나의 플랫폼에 통합하여 큰 축, 방사형 및 모멘트로드를 동시에 처리하여 복잡한 작업을 수행하면서 공간을 절약 할 수 있습니다. 사용자 정의에는 설치를 단순화하기 위해 추가 플랜지 또는 다른 볼트 패턴이 포함될 수 있습니다.
유지 보수가없는 구성 요소는 휴머노이드를 이동시킵니다
모션 시스템이있는 모든 장치와 마찬가지로 인간노이드에서는 베어링 및 기타 구성 요소를 올바르게 유지하는 것이 핵심 문제입니다. 많은 휴머노이드는 움직이는 부분의 악화없이 수천 번의 작업을 반복 할 것으로 예상됩니다. 그리고 이러한 부분은 일반적으로 단단한 공간에 통합됩니다.
IKO는 선형 가이드 및 CAM 팔로어를 포함한 많은 제품에 내장 된 윤활 요소 인 C-Lube를 사용 하여이 문제를 해결합니다. 선형 가이드에서 C- 윤활유는 트랙 레일에 닿지 않고 롤링 요소의 표면에 윤활유를 공급합니다. 이 내장 된 윤활 시스템은 5 년 또는 12,500 마일 동안 유지 보수없이 유지 될 수 있습니다. (20,116.8 km) 이상. 종합하면 C-Lube 구성 요소는 오래 지속되는 유지 보수가없는 성능을 제공하여 휴머노이드 로봇이 움직일 수 있습니다.
- 기존 작업 환경에 맞습니다. 고급 모션 제어 전략도 때때로 인간형이 독특한 작업 환경에서 수행되도록해야합니다. 로봇이 사람이 도달 할 수없는 선반 높이 또는 깊이에서 물체를 처리해야한다고 가정합니다. 올바른 모션 구성 요소 제조업체는 암이나 다리에 선형 확장 메커니즘을 추가하거나 몸통을 수정하여 인간의 물리적 한계를 극복하고보다 복잡한 작업 환경에 적응할 수있는 물리적 구조를 만들 수 있습니다.
- 유지 보수 요구 사항을 최소화합니다. 유지 보수 요구를 줄이고 예측하는 것은 분해없이 수만 번의 수만 번을 지속적으로 수행 할 것으로 예상되는 모션 시스템을 설계 할 때 중요한 측면입니다. 예를 들어 통합 센서가있는 일부 구성 요소는 운영자가 기계적 손상을 경고 할 수 있지만 IKO는 애플리케이션 수명 동안 유지 보수가없는 제품을 제조하기 위해 노력합니다.
C-Lube는 선형 가이드를위한 내장 윤활 시스템입니다. 출처 : IKO
맞춤 구성 요소는 휴머노이드에게 무료 동작 범위를 제공합니다
휴머노이드 로봇은 작업과 환경을 취할 때 자유롭게 움직이기위한 것이므로 사용자 정의 모션 구성 요소는 운동을 촉진하고 생산성과 신뢰성을 최적화하는 데 중요합니다. 휴머노이드 로봇을위한 맞춤형 솔루션을 개발할 때는 교차 롤러 베어링을 사용하여 이러한 모범 사례 중 일부를 염두에 두십시오. 휴머노이드는 24 개의 CRB를 포함 할 수 있습니다.
- 모션 정확도를 보장하십시오. 고정 로봇의 경우와 마찬가지로 정확한 움직임이 필수적입니다. 교차 롤러 베어링은 높은 강성 및 위치 정확도를 제공하도록 구성됩니다. 이 정확도는 추가로 최적화 될 수 있으며 예를 들어, 로봇 조인트의 경편을 추가하거나 클리어런스를 최소화함으로써 백래시를 제거 할 수 있으며, 이는 부드러운 움직임을 허용합니다.
- 최소화하십시오 힘 소비. Humanoid가 임무를 수행하는 데 필요한 힘이 적을수록 배터리 수명이 길어집니다. 교차 롤러 베어링은 더 효과적으로 하중을 분배하기 위해 맞춤형 디자인을 할 수 있고, 분리기를 통한 더 낮은 회전 토크를 나타내거나, 분리기를 통한 마찰을 최소화하거나, 백래시를 제거하거나, 가벼운 가중 재료를 사용하여 전력 소비를 줄일 수 있습니다.
- 설치 및 어셈블리를 고려하십시오. CRBS는 로봇 조인트에게 피벗 능력을 제공하며, 적절한 장착은 정확성을 보장하고 오정렬을 방지하는 데 핵심적이며 베어링 자체에 대한 관련 손상. 맞춤형 옵션에는 특수 하우징, 플레이트, 플랜지 및 장착 구멍이 포함될 수 있습니다.
- 가혹한 조건에 맞게 구성 요소를 지정하십시오. 대부분의 응용 분야에서 합금 52100은 좋은 강도와 방지 특성을 제공합니다. 그러나 일부 휴머노이드는 가혹한 환경에 배치되어 부식 방지 스테인리스 구조 또는 먼지와 먼지를 격퇴하고 그리스 누출을 방지하기 위해 특수 씰이 필요합니다. 검은 색 크롬과 얇은 밀도가 높은 크롬 표면 처리는 또한 많은 가혹한 환경에서 효과적인 보호를 제공합니다.
- 유지 보수를 잊지 마십시오. 전통적인 윤활 그리스가 불가능한 상황의 경우, IKO는 마른 필름 윤활제와 같은 대안을 권장하여 마찰을 줄이거 나 깨끗한 환경을위한 액정 윤활제도 권장합니다.
모션 구성 요소 공급 업체와 일찍 협력하십시오
Humanoid Robot 응용 프로그램에 대한 맞춤형 모션 구성 요소를 지정하므로 시간이 지남에 따라 발생할 수있는 추가 작업을 피하기 위해 설계 프로세스 초기에 공급 업체와 연락을 취하는 것이 중요합니다. IKO는 CRB, 선형 모션 구성 요소, 구형 부싱 및 CAM 팔로어에 대한 광범위한 전문 지식을 사용하여 휴머노이드가 만날 것으로 예상되는 모든 조건과 시나리오를 포함하는 사용자 정의 솔루션에서 캠 팔로워를 사용합니다.
우리는 휴머노이드가 작동 할 때 예상대로 수행 할 수 있도록 사용자 지정 부분을 테스트하고 검증하는 것을 포함하여 모든 단계에서 고객과 협력합니다. 모션 구성 요소가 의도한지 여부 조작,,, 간병,,, 집 유지 보수 또는 성취 주문, IKO는 안정적으로 작동하고 길고 생산적인 수명을 제공 할 맞춤형 모션 제품을 만들도록 도와 줄 준비가되었습니다.
저자에 대해
Karl Wickenheisser NJ에 본사를 둔 IKO International Inc.의 Parsippany의 영업 및 마케팅 담당 부사장입니다. 그는 IKO, Torrington Co., FAG 베어링 및 RBC 베어링에서 38 년 이상의 국제 경험을 가진 라이센스 전문 엔지니어 및 베어링 업계 베테랑입니다.
Bearing Specialist Association (BSA) 및 전력 변속기 유통 업체 협회 (PTDA)의 활동적인 회원 인 Wickenheisser는 기계 공학 학사 학위 (BEME)를 가진 Stevens Institute of Technology를 졸업했습니다. 또한 Fairfield University에서 MBA를 보유하고 있습니다.
IKO는 50 년 동안 모션 제어 경험을 가지고 있습니다. 그만큼 회사의 제품에는 바늘 롤러 베어링, 선형 모션 롤링 가이드, 정밀 포지셔닝 테이블, C- 러브 기술 및 기계 구성 요소가 포함됩니다.
편집자 주 : Humanoid Robot 개발에 대해 자세히 알아보십시오 Robobusiness 2025 년 10 월 15 일과 16 일 캘리포니아 산타 클라라에서 열립니다.

게시물 최적화 된 구성 요소는 휴머노이드 로봇의 모션 가능성을 확장합니다 먼저 나타났습니다 로봇 보고서.