
숙련된 외과 의사의 영상을 보고 처음으로 훈련받은 로봇은 인간 의사만큼 능숙하게 동일한 수술을 수행했습니다.
모방 학습을 훈련에 성공적으로 활용 수술용 로봇 의료 시술 중에 필요한 각 개별 움직임에 대해 로봇을 프로그래밍할 필요가 없으며, 로봇 수술 분야를 진정한 자율성에 더 가깝게 만들어 로봇이 인간의 도움 없이 복잡한 수술을 수행할 수 있도록 합니다.
존스 홉킨스 대학교 기계공학과 조교수이자 수석 저자인 Axel Krieger는 “이 모델을 갖는 것은 정말 마법같은 일이며 우리가 하는 일은 카메라 입력을 제공하는 것 뿐이며 수술에 필요한 로봇 움직임을 예측할 수 있습니다.”라고 말했습니다. “우리는 이것이 의료 로봇 공학의 새로운 영역을 향한 중요한 진전이라고 믿습니다.”
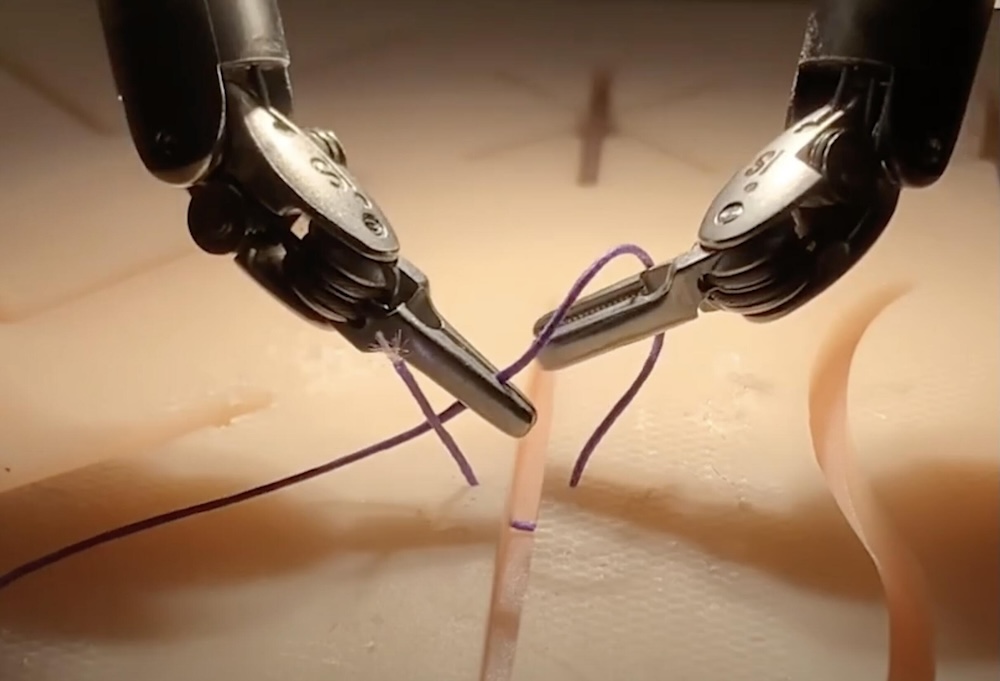
스탠포드 대학교 연구진이 포함된 팀은 모방 학습을 사용하여 Intuitive의 da Vinci Surgical System 로봇이 바늘 조작, 신체 조직 들어올리기, 봉합 등 수술 절차에 필요한 세 가지 기본 작업을 수행하도록 훈련했습니다. 각 경우에 팀의 모델로 훈련된 로봇은 인간 의사만큼 능숙하게 동일한 수술 절차를 수행했습니다.
이 모델은 ChatGPT를 뒷받침하는 동일한 기계 학습 아키텍처와 모방 학습을 결합했습니다. 그러나 ChatGPT가 단어와 텍스트로 작동하는 경우 이 모델은 로봇 동작의 각도를 수학으로 분해하는 언어인 운동학을 사용하여 “로봇”을 말합니다.
연구진은 수술 중 다빈치 로봇의 팔에 장착된 손목 카메라에서 녹화된 수백 개의 비디오를 모델에 제공했습니다. 전 세계 외과 의사들이 녹화한 이 비디오는 수술 후 분석에 사용된 후 보관됩니다. 전 세계적으로 약 7,000대의 다빈치 로봇이 사용되고 있으며, 50,000명이 넘는 외과의사가 이 시스템에 대한 교육을 받아 로봇이 ‘모방’할 수 있는 대규모 데이터 아카이브를 생성하고 있습니다.
이 모델은 ChatGPT를 뒷받침하는 동일한 기계 학습 아키텍처와 모방 학습을 결합했습니다. | 신용: 존스 홉킨스 대학교
다빈치 시스템은 널리 사용되고 있지만 연구자들은 이 시스템이 매우 부정확하다고 말합니다. 그러나 팀은 결함이 있는 입력이 작동하도록 하는 방법을 찾았습니다. 핵심은 부정확한 절대적인 동작이 아닌 상대적인 움직임을 수행하도록 모델을 훈련시키는 것이었습니다.
존스 홉킨스 대학의 박사후 연구원이자 주저자인 김지웅(Brian) 김지웅(Ji Woong “Brian” Kim)은 “우리에게 필요한 것은 이미지 입력뿐입니다. 그러면 이 AI 시스템이 올바른 조치를 찾습니다.”라고 말했습니다. “우리는 수백 개의 데모를 통해서도 모델이 절차를 학습하고 아직 경험하지 못한 새로운 환경을 일반화할 수 있다는 것을 발견했습니다.”
Krieger는 다음과 같이 덧붙였습니다. “이 모델은 우리가 가르치지 않은 내용을 학습하는 데 매우 좋습니다. 바늘을 떨어뜨리면 자동으로 바늘을 집어 계속합니다. 이건 내가 가르친 게 아니야.”
연구원들은 이 모델을 사용하여 수술 로봇을 신속하게 훈련시켜 모든 유형의 수술 절차를 수행할 수 있다고 말했습니다. 팀은 이제 모방 학습을 사용하여 작은 수술 작업뿐만 아니라 전체 수술을 수행하도록 로봇을 훈련시키고 있습니다.

{kind=link}
이러한 발전이 이루어지기 전에는 수술의 간단한 측면도 수행하도록 로봇을 프로그래밍하려면 모든 단계를 손으로 코딩해야 했습니다. 누군가는 봉합 모델을 만들기 위해 10년을 보낼 수도 있다고 Krieger는 말했습니다. 그리고 그것은 단지 한 가지 유형의 수술에 대한 봉합입니다.
Krieger는 “매우 제한적입니다.”라고 말했습니다. “여기서 새로운 점은 다양한 절차에 대한 모방 학습만 수집하면 되며 며칠 안에 이를 학습하도록 로봇을 훈련시킬 수 있다는 것입니다. 이를 통해 우리는 의료 오류를 줄이고 보다 정확한 수술을 달성하는 동시에 자율성이라는 목표를 향해 가속화할 수 있습니다.”
Johns Hopkins의 저자로는 박사 과정 학생 Samuel Schmidgall; 부연구원 Anton Deguet; 기계공학부 부교수인 Marin Kobilarov. 스탠포드 대학의 저자는 박사과정 학생인 Tony Z. Zhao와 Chelsea Finn 조교수입니다.
편집자 주: 이 기사는 다음에서 재출판되었습니다. 존스홉킨스대학교.
게시물 연구원들은 모방 학습을 사용하여 수술 로봇을 훈련시킵니다. 처음 등장한 로봇 보고서.