
인공 근육은 ETH 취리히와 Max Planck Institute for Intelligent Systems(MPI-IS)의 연구자들이 개발한 새로운 로봇 다리에 동력을 공급하고 있습니다. 살아있는 생물에서 영감을 받은 이 로봇 다리는 민첩하고 에너지 효율적인 방식으로 다양한 지형을 뛰어넘습니다.
인간과 동물에서와 마찬가지로 신근과 굴근은 로봇 다리가 양방향으로 움직일 수 있도록 보장합니다. 연구자들이 HASEL이라고 부르는 이러한 전기 유압 액추에이터는 힘줄로 골격에 부착됩니다.
그만큼 액츄에이터 오일이 채워진 플라스틱 백으로, 얼음을 만드는 데 사용하는 것과 비슷합니다. 각 백의 약 절반은 전도성 재료로 만든 검은색 전극으로 양쪽에 코팅되어 있습니다. ETH 취리히의 박사 과정 학생인 토마스 부흐너는 “전극에 전압을 가하자마자 정전기로 인해 전극이 서로 끌립니다. 마찬가지로 풍선을 머리에 문지르면 같은 정전기로 인해 머리카락이 풍선에 붙습니다.”라고 설명했습니다. 전압을 높이면 전극이 더 가까이 와서 백의 오일을 한쪽으로 밀어내 백 전체가 짧아집니다.
골격에 부착된 이러한 액추에이터 쌍은 살아있는 생물과 동일한 근육 운동 쌍을 이룹니다. 즉, 한 근육이 짧아지면 그 반대쪽 근육이 길어집니다. 연구자들은 고전압 증폭기와 통신하여 어떤 액추에이터가 수축하고 어떤 액추에이터가 확장되는지 제어하는 컴퓨터 코드를 사용합니다.
전기 모터보다 효율적
연구자들은 로봇 다리의 에너지 효율을 전기 모터로 구동되는 기존 로봇 다리의 에너지 효율과 비교했습니다. 무엇보다도 그들은 얼마나 많은 에너지가 불필요하게 열로 변환되는지 분석했습니다.
“적외선 이미지에서 모터화된 다리는 구부러진 자세를 유지해야 하는 경우 훨씬 더 많은 에너지를 소모한다는 것을 쉽게 알 수 있습니다.”라고 Buchner는 말했습니다. 반면 전기 유압식 다리의 온도는 동일하게 유지됩니다. 이는 인공 근육이 정전기적이기 때문입니다. “풍선과 머리카락의 예와 같습니다. 머리카락은 꽤 오랫동안 풍선에 붙어 있습니다.”라고 Buchner는 덧붙였습니다. “일반적으로 전기 모터로 구동되는 로봇은 열을 공기로 확산하기 위해 추가 방열판이나 팬이 필요한 열 관리가 필요합니다. 우리 시스템은 필요하지 않습니다.”라고 ETH Zurich의 박사 과정생인 Toshihiko Fukushima는 말했습니다.

{kind=link}
로봇 다리는 고르지 않은 지형에서도 민첩하게 움직인다
로봇 다리의 점프 능력은 폭발적으로 자체 무게를 들어올릴 수 있는 능력에 기반을 두고 있습니다. 연구자들은 또한 로봇 다리가 높은 수준의 적응성을 가지고 있다는 것을 보여주었는데, 이는 소프트 로봇에 특히 중요합니다. 근골격계가 충분한 탄력성을 가지고 있어야 해당 지형에 유연하게 적응할 수 있습니다.
“살아있는 동물도 다르지 않습니다. 예를 들어 무릎을 굽힐 수 없다면 고르지 않은 표면을 걷는 것이 훨씬 더 어려워집니다.” ETH 취리히에서 소프트 로보틱스 랩을 설립하고 운영하는 로버트 카츠슈만은 말했습니다. “포장 도로에서 도로로 한 걸음 내딛는 것을 생각해 보세요.”
로봇 다리의 각도를 지속적으로 알려주는 센서가 필요한 전기 모터와 달리, 인공 근육은 환경과의 상호 작용을 통해 적절한 위치에 적응합니다. 이는 두 가지 입력 신호에 의해 구동됩니다. 하나는 관절을 구부리고 다른 하나는 관절을 뻗는 신호입니다.
“지형에 적응하는 것이 핵심적인 측면입니다. 사람이 공중으로 점프한 후 착지할 때 무릎을 90도 각도로 구부려야 할지 70도 각도로 구부려야 할지 미리 생각할 필요가 없습니다.” 후쿠시마. 같은 원리가 로봇 다리의 근골격계에도 적용됩니다. 착지 시 다리 관절은 표면이 딱딱한지 부드러운지에 따라 적절한 각도로 적응적으로 움직입니다.
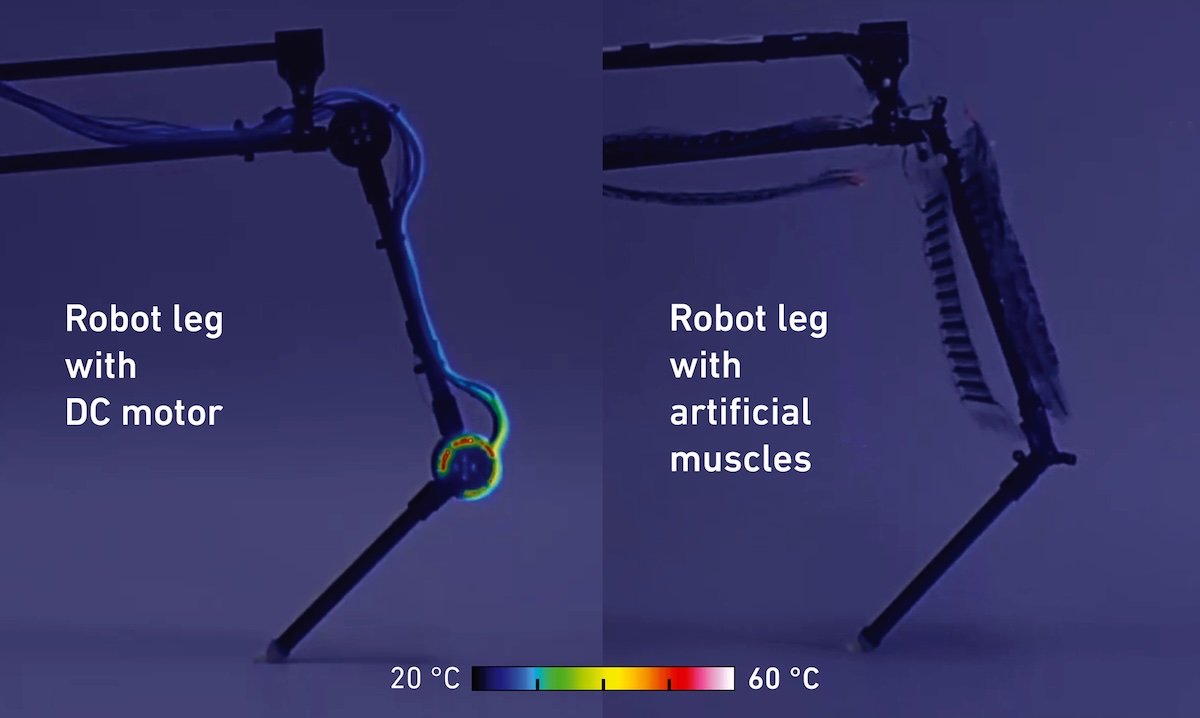
로봇 다리가 특정 위치를 오랫동안 유지해야 할 때, 많은 전류가 이를 구동하는 DC 모터(왼쪽)를 통해 흐릅니다. 시간이 지남에 따라 에너지는 열의 형태로 손실됩니다. 반면, 정전기 원리에 따라 작동하고 효율적인 인공 근육(오른쪽)은 일정한 부하 하에서 전류가 흐르지 않기 때문에 차갑게 유지됩니다. | 출처: ETH Zurich 및 MPI-IS
떠오르는 기술은 새로운 가능성을 열어줍니다
전기 유압 액추에이터 연구 분야는 아직 젊어서 불과 6년 전에 등장했습니다. “로봇 분야는 고급 제어 및 머신 러닝으로 빠르게 발전하고 있습니다. 반면, 똑같이 중요한 로봇 하드웨어는 훨씬 덜 발전했습니다.”
카츠슈만은 전기 유압 액추에이터가 건설 현장의 중장비에 사용될 가능성은 낮지만 표준 전기 모터에 비해 특정한 이점을 제공한다고 덧붙였습니다. 이는 특히 그리퍼와 같은 응용 분야에서 두드러지는데, 그립하는 물체가 예를 들어 공, 달걀 또는 토마토인지에 따라 동작을 매우 맞춤화해야 합니다.
카츠슈만은 한 가지 우려 사항이 있습니다. “전기 모터가 달린 보행 로봇과 비교했을 때, 우리 시스템은 여전히 제한적입니다. 다리는 현재 막대에 부착되어 있고, 원을 그리며 점프하며 아직 자유롭게 움직일 수 없습니다.”
향후 작업에서는 이러한 한계를 극복하여 실제 개발의 문을 열어야 합니다. 걷는 로봇 인공 근육을 사용합니다. 그는 더 자세히 설명합니다. “로봇 다리를 4족보행 로봇이나 두 다리가 있는 휴머노이드 로봇에 결합하면 언젠가 배터리로 구동되는 구조 로봇으로 배치할 수 있을 것입니다.”
편집자 주: 이 기사는 다음에서 재게시되었습니다. ETH 취리히.
게시물 ETH Zurich, 전기 유압 액추에이터로 구동되는 로봇 다리 개발 처음 등장 로봇 리포트.