{kind=link}

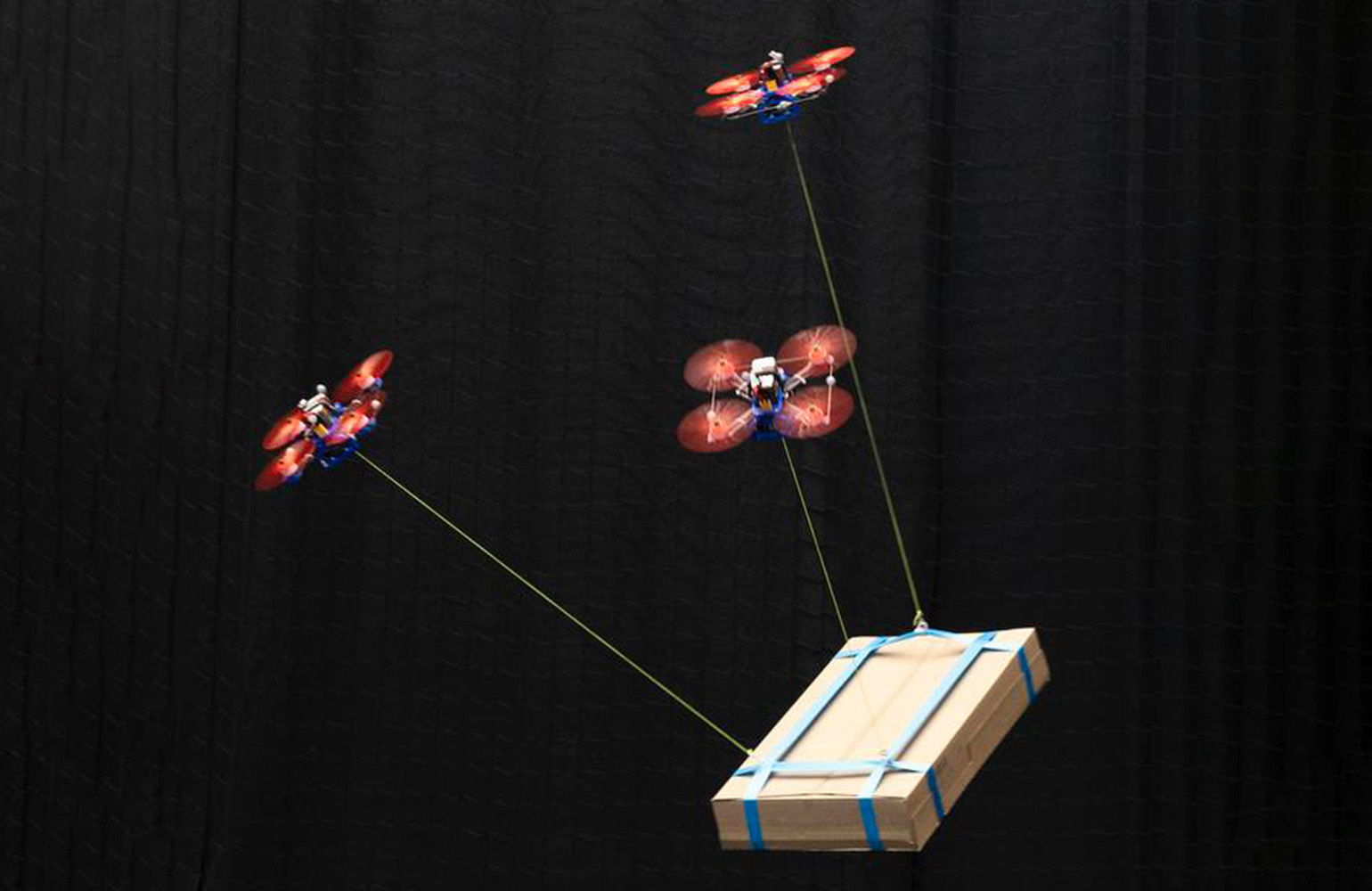
TU Delft에서 개발된 새로운 알고리즘을 사용하여 세 대의 드론이 함께 작동하여 패키지를 운반합니다. | 출처: 순시하오
네덜란드 TU Delft의 과학자들은 여러 개의 자율 드론이 함께 작동하여 무거운 탑재량을 제어하고 운반할 수 있는 알고리즘을 개발했습니다. 바람이 많이 부는 환경에서도 작동한다고 대학 연구진은 말했습니다.
그들은 새로운 알고리즘이 해상 풍력 터빈과 같이 접근하기 어려운 인프라에 도달하고 유지하는 데 적합하다고 주장했습니다. 종종 혹독한 날씨, 제한된 탑재량, 예측할 수 없는 환경과의 접촉으로 인해 현재의 드론 안전하고 효과적으로 운영할 수 있습니다.
TU Delft의 로봇공학 연구원인 Sihao Sun은 “드론 한 대는 매우 제한된 하중만 운반할 수 있습니다.”라고 설명했습니다. “이로 인해 무거운 건축 자재를 외딴 지역으로 운반하거나, 산악 지역에서 대량의 농작물을 운반하거나, 구조 임무를 지원하는 등의 작업에 드론을 사용하기가 어렵습니다.”
알고리즘은 빠른 조정을 다룹니다.
이러한 한계를 극복하기 위해, 기술 대학 팀 디자인된 여러 대의 드론이 케이블을 통해 페이로드에 연결되는 시스템입니다. 이를 통해 훨씬 더 무거운 짐을 운반할 수 있다고 TU Delft는 말했습니다.
드론은 실시간으로 위치를 조정해 무거운 물체를 들어올리고 운반할 수 있을 뿐만 아니라 방향도 제어할 수 있다. 이는 복잡한 환경에서 정확한 배치를 위해 중요합니다.
Sun은 “진정한 과제는 조정입니다.”라고 말했습니다. “드론이 물리적으로 연결되면 서로 반응하고 빠른 동작으로 페이로드의 갑작스러운 움직임과 같은 외부 방해에 반응해야 합니다. 기존 제어 알고리즘은 그러기에는 너무 느리고 엄격합니다.”
“우리는 자체 쿼드로터를 제작하고 통제된 실험실 환경에서 테스트했습니다.”라고 그는 덧붙였습니다. “한 번에 최대 4대의 드론을 사용하고, 장애물을 추가하고, 팬을 사용하여 바람을 시뮬레이션했으며, 심지어 농구공처럼 움직이는 페이로드를 사용하여 동적 반응을 테스트했습니다.”
시스템이 모든 테스트를 통과했습니다. 그리고 드론은 자율적이기 때문에 목적지만 지정하면 됩니다. 그들은 길을 따라 장애물과 방해 요소를 조정하면서 독립적으로 탐색합니다.
Sun은 “어디로 가야 할지 알려만 주면 나머지는 알아서 해줄 것입니다.”라고 회상했습니다.
TU Delft의 실제 사용 계획
TU Delft 팀은 새로운 알고리즘이 빠르고 유연하며 강력하다고 말했습니다. 페이로드 자체에 센서를 설치하지 않고도 페이로드 변경에 적응하고 외부 힘을 보상할 수 있습니다. 이는 실제 시나리오에서 중요한 이점입니다.
현재 이 시스템은 실내 테스트를 위해 외부 모션 캡처 카메라를 사용하므로 아직 실외 환경에서는 유용하지 않습니다. 팀은 실제 배포를 위한 기술을 준비하기를 희망한다고 말했습니다. 수색 및 구조 분야에 잠재적으로 응용될 수 있습니다. 농업및 원격 건설말했다.
게시물 드론이 함께 작동하여 무거운 탑재량을 운반할 수 있게 해주는 TU Delft 알고리즘 처음 등장한 로봇 보고서.